4. Proses Kontrol Bloğu ve task_struct Yapısı
Bu bölümde proses kavramı ve proses kontrol bloğu üzerinde duracağız ve Linux çekirdeğindeki proses
kontrol bloğunu temsil eden task_struct yapısını ele alacağız.
4.1. Proses Kavramı
İşletim sistemlerinde program terimi çoğu kez “çalıştırılabilen bir dosyayı” ya da “bir kaynak dosyayı” belirtmektedir. Çalışmakta olan programlara ise proses denilmektedir. Bir program çalıştırıldığında artık o bir proses haline gelmektedir. Aynı programı birden fazla kez de çalıştırabiliriz. Bu durumda birbirinden bağımsız birden fazla proses oluşacaktır.
4.2. Proses Kontrol Bloğu
İşletim sistemlerinin proses yönetimlerindeki en önemli veri yapısı proses kontrol bloğu (process control block) denilen veri yapısıdır. İşletim sistemleri her proses için kavramsal olarak ismine “proses kontrol bloğu” denilen bir yapı türünden nesne oluşturmaktadır. Proseslerin yönetimi proses kontrol bloğu denilen bu veri yapısına başvurularak yapılmaktadır. Proses kontrol bloğu terimi yerine bazı kaynaklar proses betimleyicisi (process descriptor) terimini de kullanmaktadır.
Proses kontrol blokları içerisinde prosese ilişkin gerekli bütün bilgiler bulundurulmaktadır. Bu bilgilerden bazıları şunlardır:
Prosesin kullanıcı id’si, grup id’si gibi hesap (credential) bilgileri
Proses id’si
Prosesin üst prosesinin, alt proseslerinin, kardeş proseslerinin hangi prosesler olduğu bilgisi
Prosesin durumsal bilgisi
Prosesin bağlamsal geçişini (context switch) sağlama için gereksinim duyulan alanlar
Prosesin bellekte nereye yüklü olduğu gibi bellekle ilgili bilgileri
Prosesin çizelgeleyici ile ilgili olan bilgileri (örneğin çizelgeleme politikası, önceliği gibi)
Prosesin CPU kullanım istatistiği
Prosesin sinyal bilgileri
Prosesin proseslerarası haberleşme için gerekli olan bilgileri
Prosesin çalışma dizini (current working directory)
Prosesin açmış olduğu dosyalara ilişkin bilgiler
4.3. task_struct Yapısı
Linux çekirdeğinde proses kontrol bloğu <include/linux/sched.h> dosyası içerisinde bulunan
task_struct isimli yapıyla temsil edilmiştir. Bu task_struct nesnesi eskiden daha az eleman
içeriyordu. Sonra çekirdek gittikçe geliştirilince dev bir yapı haline geldi. Örneğin bu task_struct
nesnesi Linus projeye ilk başlandığında (Linux 0.01) şu biçimdeydi:
struct task_struct {
/* these are hardcoded - don't touch */
long state; /* -1 unrunnable, 0 runnable, >0 stopped */
long counter;
long priority;
long signal;
fn_ptr sig_restorer;
fn_ptr sig_fn[32];
/* various fields */
int exit_code;
unsigned long end_code,end_data,brk,start_stack;
long pid,father,pgrp,session,leader;
unsigned short uid,euid,suid;
unsigned short gid,egid,sgid;
long alarm;
long utime,stime,cutime,cstime,start_time;
unsigned short used_math;
/* file system info */
int tty; /* -1 if no tty, so it must be signed */
unsigned short umask;
struct m_inode * pwd;
struct m_inode * root;
unsigned long close_on_exec;
struct file * filp[NR_OPEN];
/* ldt for this task 0 - zero 1 - cs 2 - ds&ss */
struct desc_struct ldt[3];
/* tss for this task */
struct tss_struct tss;
};
Çekirdeğin 2.4’lü versiyonunda bu yapı oldukça büyümüş, bellek, sinyal, dosya sistemi ve kimlik bilgileri
gibi pek çok alanı kapsayan kapsamlı bir yapı haline gelmiştir. Bugünkü 6’lı çekirdeklerde bu yapı birkaç
sayfa uzunluğundadır. Eskiden yapının her elemanı çekirdek derlemesine dahil ediliyordu. Ancak 2.6’lı
versiyonlardan başlanarak artık yapı elemanlarının bazıları konfigürasyona bağlı olarak yapıya dahil
edilmektedir. Bu nedenle gelişmiş çekirdeklerde yapıda aşağıdaki gibi #ifdef blokları görürseniz
şaşırmayınız:
struct task_struct {
#ifdef CONFIG_THREAD_INFO_IN_TASK
struct thread_info thread_info;
#endif
unsigned int __state;
/* saved state for "spinlock sleepers" */
unsigned int saved_state;
randomized_struct_fields_start
void *stack;
refcount_t usage;
unsigned int flags;
...
};
Bilindiği gibi Linux sistemlerinde yeni bir proses fork isimli POSIX fonksiyonuyla yaratılmaktadır.
fork POSIX fonksiyonu çekirdek içerisindeki sys_fork isimli sistem fonksiyonunu çağırmaktadır. Yeni
çekirdeklerde bu fonksiyon da kernel_clone isimli çekirdek fonksiyonunu çağırmaktadır. İşte
task_struct nesnesi bu fonksiyonlar tarafından çekirdeğin heap alanında yaratılmaktadır.
4.4. Proseslerin ID Değerleri (PID)
Bilindiği gibi UNIX/Linux sistemlerinde her prosesin (yani çalışmakta olan her programın) o anda sistem
genelinde tek (unique) olan bir proses id (process id) değeri vardır. Proses id değeri hem çekirdek
tarafından hem de kullanıcı modundan çağrılabilen sistem fonksiyonları tarafından kullanılan bir
kavramdır. Proses id değeri bir prosesi temsil etmekte kullanılan tamsayısal bir değerdir. ps komutuyla
proseslere ilişkin proses id değerlerinin görüntülendiğini anımsayınız. Kullanıcı modunda getpid POSIX
fonksiyonu çalışmakta olan programın proses id değerini, getppid POSIX fonksiyonu ise üst prosesin
proses id değerini vermektedir. Tabii prosesin proses id değeri ve üst prosesin proses id değeri proses
kontrol bloğunda yani task_struct nesnesi içerisinde saklanmaktadır.
4.5. Thread Kavramı
İşletim sistemlerine thread kavramı 90’lı yıllarda sokulmuştur. Ancak ilk thread denemeleri çeşitli çalışmalar eşliğinde daha önceleri yapılmıştır. Linux işletim sistemine thread’ler ilk kez çekirdeğin 2.0 versiyonuyla eklenmiş olsa da daha sonra çeşitli düzeltmelerle thread yapısı biraz değiştirilmiştir.
Proses kavramı çalışmakta olan programın tüm bilgilerini temsil etmektedir. Halbuki thread yalnızca bir akış belirtmektedir. Bir proses tek thread’le çalışmaya başlar. Prosesin çalışmaya başladığı thread’e ana thread (main thread) de denilmektedir. Thread’ler de kullanıcı modundan sistem fonksiyonları (sys_clone sistem fonksiyonu) ile yaratılmaktadır.
UNIX türevi sistemlere thread’ler ilk kez sokulduğunda farklı varyantlar farklı thread kütüphaneleri kullanıyordu. Sonra thread kavramı POSIX standartlarına da POSIX.1c ile 1995 yılında sokuldu. Böylece POSIX taşınabilir thread fonksiyonları oluşturuldu. POSIX’in taşınabilir thread fonksiyonlarının gerçekleştirimi için Linux ve diğer UNIX varyantları çekirdek içerisinde de değişiklikler yapmak zorunda kalmıştır.
Thread’lerin yalnızca bir akış belirttiğini söylemiştik. Proses kavramı ise tüm thread’lerle birlikte çalışmakta olan programın tüm bilgilerini temsil etmektedir. Pek çok bilgi thread’e özgü değildir, prosese özgüdür. Örneğin bir thread’in “çalışma dizini (current working directory)” diye bir kavram yoktur. Prosesin çalışma dizini diye bir kavram vardır. Örneğin bir thread’in kullanıcı id’si, grup id’si diye bir kavram yoktur. Prosesin kullanıcı id’si ve grup id’si diye bir kavram vardır. Yani çalışmakta olan programa ilişkin pek çok bilgi programın tüm thread’leri için de geçerlidir.
Aslında thread’ler aynı bellek alanını ve ortak bilgileri kullanan prosesler gibi de düşünülebilir. Zaten Linux işletim sisteminde thread yaratmakla proses yaratmak aslında aynı çekirdek fonksiyonuyla yapılmaktadır. Yani bir prosesin thread’lerini biz aynı bellek alanını kullanan prosesler gibi de düşünebiliriz.
Linux işletim sisteminde thread’ler de adeta aynı bellek alanı üzerinde çalışan birer proses gibi
düşünülmüştür. Bu nedenle yalnızca prosesler için değil thread’ler için de task_struct nesneleri
oluşturulmaktadır. Tabii işletim sistemi bir prosesin thread’lerini izleyen paragraflarda göreceğimiz
biçimde bağlı listelerde tutmaktadır.
4.6. Prosesler Arasındaki Altlık-Üstlük İlişkisi
UNIX/Linux sistemlerinde prosesler arasında kuvvetli bir altlık-üstlük (parent-child) ilişkisi vardır.
Bir proses yaratıldığında prosesin task_struct bilgilerinin çoğu üst prosesten (parent process)
alınmaktadır. Örneğin bir program başka bir programı fork/exec ile çalıştırdığında çalıştırılan
program çalıştıran programın pek çok özelliğini almaktadır. Örneğin fork işlemi sırasında fork
yapan programın kullanıcı id’si ve çalışma dizini neyse yeni yaratılan alt prosesin (child process)
kullanıcı id’si ve çalışma dizini de aynı olur. Daha teknik olarak ifade edersek fork işlemi sırasında
alt proses için yaratılan task_struct nesnesinin pek çok elemanı üst prosesin task_struct
nesnesinden kopyalanmaktadır.
POSIX thread sisteminde thread’ler arasında önemli bir altlık-üstlük ilişkisi yoktur. Yani birkaç özel durum dışında bir thread’i hangi thread’in yarattığının önemi yoktur.
4.7. task_struct Yapısının Dallı Budaklı Tasarımı
task_struct yapısının pek çok gösterici elemanı vardır. Bu gösterici elemanları başka yapıları
göstermektedir. Hatta o gösterici elemanların gösterdiği yapıların elemanları da başka yapıları
göstermektedir. O halde task_struct aslında dallı budaklı bir yapıdır. Biz bir bilginin proses
kontrol bloğunda olduğunu söylediğimiz zaman o bilginin hemen task_struct içerisindeki bir elemanda
olduğunu kastetmeyeceğiz. O bilgi task_struct içerisindeki bir elemanın gösterdiği başka bir yapının
içerisinde de olabilir. Önemli olan o bilgiye task_struct yapısından hareketle erişilebilmesidir.
Bir task_struct yapı nesnesinin ana elemanları diğer bir task_struct nesnesine kopyalanırsa
aslında asıl yapı nesnesi ile kopyalanmış olan yapı nesnesinin gösterici elemanları aynı yerleri gösterir
duruma gelir. Programlamada bu tür kopyalamaya sığ kopyalama (shallow copy) denildiğini anımsayınız.
Aslında task_struct yapısının bu biçimdeki dallı budaklı tasarımı üst proses-alt proses ilişkisinde
alt prosesin üst prosesten birtakım özellikleri alması (inherit etmesi) sürecinde faydalar sağlamaktadır.
Böylece alt prosesin task_struct nesnesine daha az eleman kopyalanmaktadır. Örneğin güncel
çekirdeklerdeki task_struct yapısının aşağıdaki kısmına dikkat ediniz:
struct task_struct {
/* ... */
/* Filesystem information: */
struct fs_struct *fs;
/* Open file information: */
struct files_struct *files;
/* ... */
};
Burada aslında fs göstericisi aşağıdaki gibi bir yapıyı göstermektedir:
struct fs_struct {
int users;
spinlock_t lock;
seqcount_spinlock_t seq;
int umask;
int in_exec;
struct path root, pwd;
} __randomize_layout;
Prosesin kök dizininin ve çalışma dizinin burada tutulduğuna dikkat ediniz. files göstericisi ise
aşağıdaki gibi bir yapıyı göstermektedir:
struct files_struct {
atomic_t count;
bool resize_in_progress;
wait_queue_head_t resize_wait;
struct fdtable __rcu *fdt;
struct fdtable fdtab;
spinlock_t file_lock ____cacheline_aligned_in_smp;
unsigned int next_fd;
unsigned long close_on_exec_init[1];
unsigned long open_fds_init[1];
unsigned long full_fds_bits_init[1];
struct file __rcu * fd_array[NR_OPEN_DEFAULT];
};
fork işlemi sırasında sığ kopyalama yapıldığından dolayı fork işleminden sonra üst ve alt prosesin
task_struct nesnelerinin fs ve files göstericileri aynı fs_struct ve files_struct
nesnelerini gösteriyor olacaktır.
4.8. current Makrosu
Thread’lerin de tıpkı prosesler gibi task_struct nesnelerine sahip olduğunu belirtmiştik. Peki
işletim sisteminin çizelgeleyici (scheduler) alt sistemi neleri çizelgelemektedir? İşte çizelgeleyici
alt sistem aslında yalnızca thread’leri yani thread’lere ilişkin task_struct nesnelerini
çizelgelemektedir. Yani çizelgeleyici alt sistemin çalışma kuyruğunda (run queue) yalnızca
task_struct nesnelerinin olduğunu varsayabilirsiniz. Bir proses yaratıldığında zaten o proses için
yaratılan task_struct nesnesi aynı zamanda prosesin ana thread’inin task_struct nesnesi gibidir.
Başka bir deyişle aslında bütün task_struct nesneleri birer thread belirtmektedir.
Eskiden Linux sistemleri yalnızca tek işlemciyi destekliyordu. Sonra 2.0 versiyonuyla birlikte çekirdek
zamanla birden fazla işlemciyi ya da çekirdeği (core) destekler hale geldi. İşte bir thread çalışırken
task_struct * türünden current isimli global değişken o anda çalışmakta olan thread’e ilişkin
task_struct nesnesini gösterecek biçimde ayarlanmaktadır. Yani bir çekirdek kodunda current
göstericisini görürseniz bu current göstericisi o anda çalışmakta olan thread’e ilişkin task_struct
nesnesini gösteriyor durumda olacaktır. Tabii bu current göstericisinin o anda çalışan thread’e ilişkin
task_struct nesnesini göstermesini bağlamsal geçişi (context switch) gerçekleştiren çizelgeleyici alt
sistem sağlamaktadır.
Bir süredir birden fazla işlemciyi ya da çekirdeği destekleyen Linux çekirdeklerinde artık current değişkeni bir gösterici değil fonksiyon belirtmektedir. Mevcut çekirdeklerde current aşağıdaki gibi bir makro biçiminde tanımlanmıştır:
#define current get_current()
Görüldüğü gibi artık biz current değişkenini kullandığımızda aslında get_current() fonksiyonunu çağırıp bu fonksiyonun geri dönüş değerini kullanmış olmaktayız. Bu konunun ayrıntıları thread’in çekirdek stack alanı (kernel stack) ve işlemciye özgü global alanlar konusuyla ilgilidir ve başka bir bölümde ele alınacaktır.
Biz kursumuzda current için “current göstericisi” ya da “current makrosu” terimlerini kullanacağız.
4.9. fork ve pthread_create Çağrı Zincirleri
Bilindiği gibi UNIX/Linux sistemlerinde kullanıcı modunda yeni bir proses fork POSIX fonksiyonu ile, yeni bir thread de pthread_create fonksiyonu ile yaratılmaktadır. Yukarıda da belirttiğimiz gibi aslında bu iki çağrı da belirli bir noktadan sonra çekirdek içerisindeki aynı fonksiyonları çağırmaktadır:
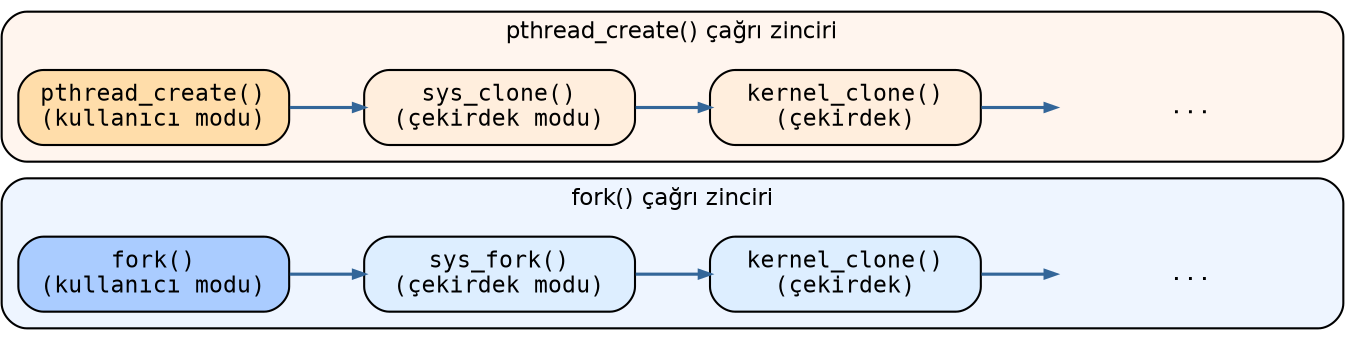
O halde aslında çekirdek gözüyle bakıldığında bir thread başka bir thread tarafından yaratılmaktadır.
Yani bu yaratımda iki thread söz konusudur: Yaratan thread ve yaratılan thread. Yaratan thread’e ilişkin
zaten task_struct nesnesi mevcuttur. O halde yaratılan thread için de bir task_struct nesnesi
oluşturulup bir biçimde bu yapılar ilişkilendirilecektir.
4.10. task_struct Nesneleri Arasındaki Bağ İlişkileri
Şimdi de task_struct nesneleri arasındaki ilişkilerin bağlı listelerle nasıl oluşturulduğu üzerinde
duracağız. Çekirdeğin bir prosesin thread’lerine sonra da alt proseslerine nasıl eriştiğini açıklayacağız.
4.10.1. Thread Listesi: thread_head ve thread_node
Bir prosesin thread’lerine erişim için eskiden task_struct içerisindeki thread_group isimli
döngüsel bağlı liste bağı kullanılıyordu. 4.2 çekirdeği (2015) ile birlikte bu veri yapısında bir
değişiklik yapılmıştır. Yeni sistemde prosesin thread’lerine ilişkin bağlı listenin kök düğümü prosesin
sinyal bilgilerinin bulunduğu yerde saklanmaktadır. Prosesin sinyal bilgileri task_struct içerisindeki
signal göstericisinin gösterdiği yerdeki signal_struct yapısı içerisinde tutulmaktadır. İşte
signal_struct yapısının thread_head elemanı da prosesin thread’lerine ilişkin bu kök düğümü
belirtmektedir. Prosesin thread’lerinin bağlı listesi için ise task_struct içerisindeki thread_node
elemanı kullanılmaktadır. Thread listesine ilişkin ilgili elemanları şöyle betimleyebiliriz:
struct signal_struct {
/* ... */
struct list_head thread_head;
/* ... */
};
struct task_struct {
/* ... */
struct signal_struct *signal;
struct list_head thread_node;
/* ... */
};
Aşağıdaki diyagram bu bağlı listenin yapısını göstermektedir. Mavi renkteki thread_head kök düğümü
signal_struct içerisindedir; turuncu renkteki thread_node düğümleri ise her bir thread’e ait
task_struct içerisindedir:

thread_node bağlı listesi çekirdeğe ilk eklendiğinde bir süre eski thread_group listesi de
muhafaza edilmişti. Sonra tamamen eski thread_group listesi task_struct içerisinden kaldırıldı.
Artık yeni çekirdeklerde prosesin thread’lerinin task_struct nesnelerini elde etmek için prosesin
signal_struct nesnesindeki thread_head kök düğümünden başlanarak bağlı listenin thread_node
düğümlerinin dolaşılması gerekmektedir.
Aslında Linux çekirdeklerinde prosesin tüm thread’lerine ilişkin task_struct içerisinde bulunan
signal göstericisi aynı signal_struct nesnesini göstermektedir. Yani thread_head kök düğümüne
biz prosesin ana thread’inden erişmek zorunda değiliz. Prosesin herhangi bir thread’ine ilişkin
task_struct nesnesindeki signal göstericisi yoluyla bu kök düğüme erişebiliriz.
Çekirdek içerisinde bir task_struct yapısının prosesin ana thread’ine ilişkin olup olmadığını
belirleyen thread_group_leader isimli bir makro da vardır:
#include <linux/sched/signal.h>
static inline bool thread_group_leader(struct task_struct *p)
{
return p->exit_signal >= 0;
}
Tabii aslında bir task_struct nesnesinin ana thread’e ilişkin olup olmadığı p == p->group_leader
ya da p->pid == p->tgid işlemiyle anlaşılabilir. Ancak özel bir bilgi olarak task_struct
içerisindeki exit_signal elemanı da bu bilgiyi verebilmektedir. Bu eleman eğer thread ana thread
değilse -1 değerinde, ana thread ise >= 0 değerinde olmaktadır.
Linux çekirdeğinde terminoloji bağlamında “prosesin ana thread’i” yerine thread grup lideri (thread group leader) terimi tercih edilmektedir.
4.10.2. pid ve tgid Elemanları
Bilindiği gibi UNIX/Linux sistemlerinde her prosesin sistem genelinde tek (unique) olan bir proses id
(pid) değeri vardır. Linux çekirdeği prosesin id değerini prosesin ana thread’ine ilişkin task_struct
içerisindeki pid elemanında saklamaktadır:
struct task_struct {
/* ... */
pid_t pid;
/* ... */
};
Linux’ta her thread’in task_struct nesnesinde ayrı bir pid değeri vardır, fakat prosesin pid
değeri denildiğinde prosesin ana thread’inin pid değeri anlaşılmaktadır. Ana thread’in pid değeri aynı
zamanda task_struct içerisindeki tgid isimli bir eleman da tutulmaktadır. task_struct nesnesi
hangi thread’e ilişkin olursa olsun tgid elemanı her zaman prosesin ana thread’inin pid değerini
tutmaktadır:
struct task_struct {
/* ... */
pid_t pid; /* o thread'e ilişkin pid değeri, POSIX'te böyle bir kavram yok */
pid_t tgid; /* ana thread'e ilişkin pid değeri, getpid bu değeri veriyor */
/* ... */
};
O halde bazı ayrıntıları da göz ardı edersek getpid POSIX fonksiyonunun çağırdığı sys_getpid sistem
fonksiyonu prosesin proses id değerini doğrudan current göstericisinin gösterdiği task_struct
nesnesinin içerisindeki tgid değerinden alarak vermektedir:

Şimdi aklınıza “neden her thread’te ayrıca ana thread’in pid değeri tgid ismiyle tutuluyor?” sorusu
gelebilir. Bunun iki nedeni vardır: Birincisi prosesin ana thread’i sonlanabilir, bu durumda ana thread’e
ilişkin task_struct nesnesine erişilemeyebilir. İkincisi ise bu yolla prosesin id değerine daha hızlı
erişimin sağlanabilmesidir.
Linux’ta thread’lere özgü pid değeri Linux’a özgü gettid fonksiyonu ile elde edilebilmektedir:
#define _GNU_SOURCE
#include <unistd.h>
pid_t gettid(void);
Not
gettid fonksiyonunun bir POSIX fonksiyonu olmadığına dikkat ediniz.
4.10.3. group_leader Göstericisi
Aslında Linux çekirdeği thread’lere ilişkin task_struct nesnelerinde yalnızca prosesin ana thread’ine
ilişkin pid değerini değil, aynı zamanda ana thread’in task_struct nesnesinin adresini de
tutmaktadır. Ana thread’in task_struct nesnesinin adresi task_struct yapısının group_leader
elemanında tutulmaktadır:
struct task_struct {
/* ... */
pid_t pid; /* o thread'e ilişkin pid değeri */
pid_t tgid; /* ana thread'e ilişkin pid değeri */
struct task_struct *group_leader; /* ana thread'e ilişkin task_struct nesnesinin adresi */
/* ... */
};
Peki prosesin ana thread’i sonlandığında group_leader göstericisinin ve signal_struct yapısı
içerisindeki list_head düğümünün durumu ne olacaktır? İşte Linux çekirdeği prosesin ana thread’i
sonlandığında istisna olarak ana thread’e ilişkin task_struct nesnesini yok etmemektedir (başka bir
deyişle hortlak (zombie) olarak tutmaktadır). Yani bu group_leader göstericisi her zaman geçerli
bir task_struct nesnesini gösteriyor durumda olmaktadır.
4.10.4. real_parent ve parent Göstericileri
Şimdi de Linux çekirdeğinde prosesler arasındaki altlık-üstlük ilişkisinin nasıl sağlandığı üzerinde duralım. Bilindiği gibi UNIX/Linux sistemlerinde her proses başka bir prosesin thread’i tarafından fork işlemi ile yaratılmaktadır. Bu durumda prosesi yaratan thread’in ilişkin olduğu prosese üst proses (parent process), yeni yaratılan prosese de alt process (child process) denilmektedir.
Her thread’in task_struct nesnesi içerisindeki real_parent ve parent isimli göstericiler o
thread’i yaratan thread’in task_struct nesnesinin adresini tutmaktadır:
struct task_struct {
/* ... */
pid_t pid;
pid_t tgid;
struct task_struct *group_leader;
struct task_struct __rcu *real_parent; /* fork yapan üst prosesteki thread */
struct task_struct __rcu *parent; /* fork yapan üst prosesteki thread */
/* ... */
};
Burada real_parent üst prosese ilişkin thread’in task_struct nesnesinin adresini tutmaktadır.
Normalde real_parent elemanı ile parent elemanı aynı task_struct nesnesini gösterir. Ancak
seyrek durumlarda (örneğin debug işlemlerinde ve ptrace işlemlerinde) geçici olarak parent başka
bir task_struct nesnesini de (reparenting işlemi) gösteriyor durumda olabilmektedir.
getppid POSIX fonksiyonu üst prosesin pid değerini vermektedir. İşte bu fonksiyonun çağırdığı
sys_getppid sistem fonksiyonu real_parent elemanının gösterdiği task_struct nesnesi içerisindeki
tgid değerini geri döndürmektedir.
4.10.5. Alt Proses Listesi: children ve sibling Elemanları
Şimdi de bir prosesin alt proseslerinin nasıl bağlı listelerde tutulduğu üzerinde duralım. Örneğin bir
proses üç kez fork yapmış olsun. Bu durumda bu prosesin üç tane alt prosesi olacaktır. Üst prosesleri
aynı olan proseslere kardeş prosesler (sibling processes) de denilmektedir. İşte bir prosesin alt
prosesleri children isimli kök düğümle erişilen sibling bağları yoluyla bağlı listede
tutulmaktadır:
struct task_struct {
/* ... */
struct list_head children; /* alt proses listesinin kök düğümü */
struct list_head sibling; /* alt proseslerin bağlı liste bağı */
/* ... */
};
Aşağıdaki diyagram bu ilişkiyi görsel olarak ortaya koymaktadır. Üst prosesin children düğümü (kök)
mavi, alt proseslerin sibling düğümleri turuncu renkte gösterilmiştir:
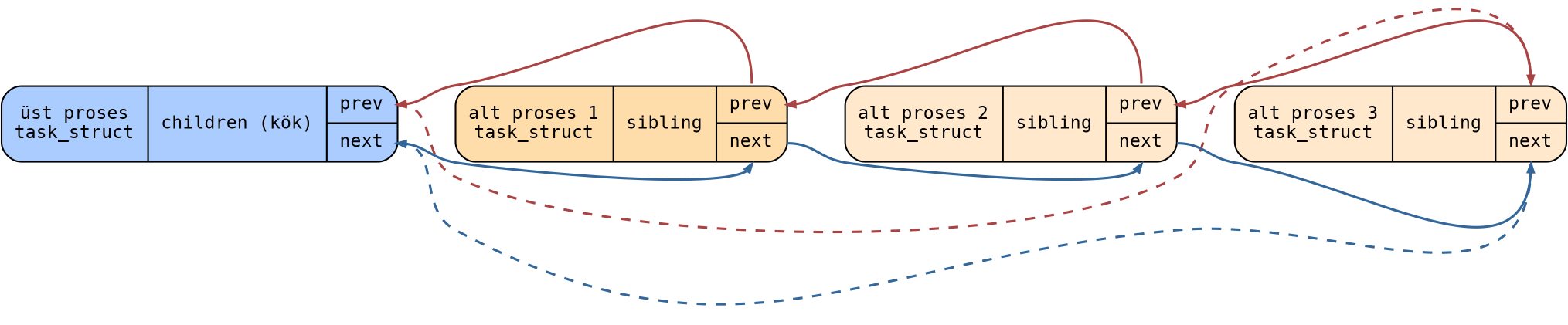
sibling bağları her zaman prosesin ana thread’ine ilişkin (grup liderine ilişkin) task_struct
nesnelerini göstermektedir. Bir thread akışında yeni bir thread yaratıldığı zaman yaratılan thread bu
children/sibling listesinde bulunmaz; prosesin thread’leri yalnızca thread_head/thread_node
listesinde tutulmaktadır.
Ayrıca Linux’ta alt proses listesi ana thread’in children kök düğümünden hareketle dolaşılmak
zorundadır. Alt prosesler yaratıldığında yalnızca ana thread’in children kök düğümü güncellenmektedir.
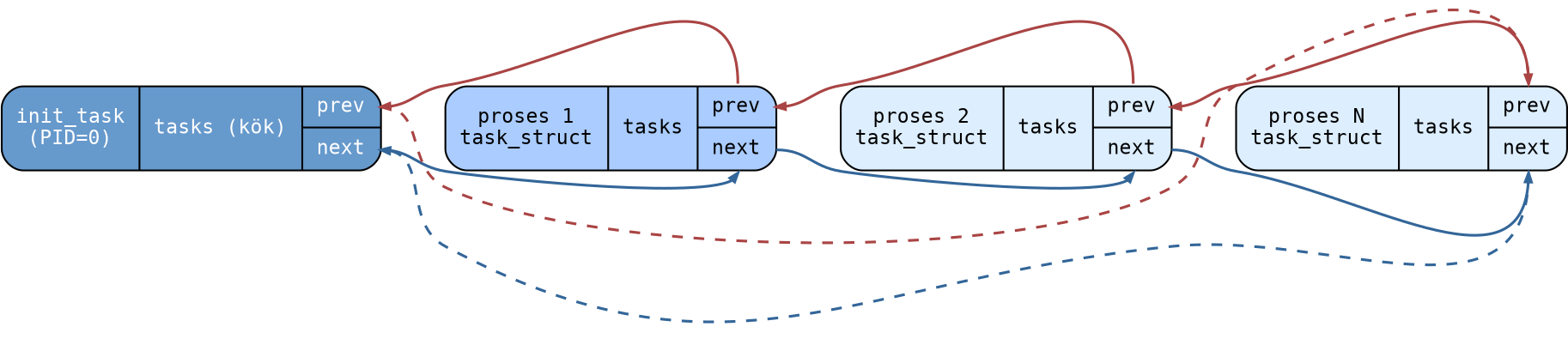
4.10.6. Tüm Proseslerin Listesi: tasks
Çekirdek ayrıca proseslerin ana thread’lerine ilişkin task_struct nesnelerini de task_struct
içerisindeki tasks isimli bir düğüm ile birbirine bağlamaktadır:
struct task_struct {
/* ... */
pid_t pid;
pid_t tgid;
struct task_struct *group_leader;
struct task_struct __rcu *real_parent;
struct task_struct __rcu *parent;
struct list_head children;
struct list_head sibling;
struct list_head tasks; /* ana thread'lerin tutulduğu liste bağı */
/* ... */
};
Bu tasks düğümlerine ilişkin bağlı listenin kök düğümü init_task prosesindedir. Linux’ta boot
işlemi sırasında ilk oluşturulan prosese init_task denilmektedir. Bu init_task prosesine ilişkin
task_struct nesnesi statik bir biçimde init/init_task.c dosyasında bulunmaktadır. init_task
prosesinin pid değeri 0’dır. init_task prosesi init prosesini yarattıktan sonra işlevini sonlandırarak
durdurulmaktadır. Ancak bu prosese ilişkin task_struct nesnesi gerçek anlamda hiçbir zaman yok
edilmemektedir. İşte init_task.tasks elemanı proseslerin ana thread’lerine ilişkin task_struct
nesnelerini dolaşmak için bir kök düğüm olarak kullanılmaktadır.
Aşağıdaki diyagram tasks bağlı listesini göstermektedir. Kök düğüm init_task (PID=0) koyu mavi,
proseslerin ana thread task_struct nesneleri açık mavi renktedir:
4.10.7. Özet: task_struct İlişkileri
Yukarıda açıkladığımız konuyu madde madde özetleyelim:
Her thread’in ayrı bir pid değeri vardır, ancak POSIX’teki getpid fonksiyonu ana thread’in (thread grup liderinin) pid değerini vermektedir.
Bir prosesin tüm thread’lerini dolaşmak için
signalgöstericisinin gösterdiğisignal_structyapısı içerisindekithread_headbağlı listesithread_nodedüğümleriyle dolaşılır.task_structiçerisindekireal_parentveparentgöstericileri o prosesi ya da thread’i yaratan thread’intask_structnesnesini göstermektedir.task_structiçerisindekitgidprosesin ana thread’inin pid değerini,group_leadergöstericisi ise prosesin ana thread’inintask_structnesnesinin adresini tutmaktadır. Ana thread sonlansa bile onuntask_structnesnesi proses sonlanana kadar muhafaza edilmektedir.Bir prosesin bütün alt proseslerine ilişkin ana thread’lerin
task_structnesnelerichildren/siblingbağlı listesinde tutulmaktadır.Prosesin alt proseslerini elde etmek için prosesin ana thread’inin
childrenkök düğümünden yola çıkmak gerekir.Çekirdek yaratılmış olan tüm proseslerin ana thread’lerine ilişkin
task_structnesnelerini ayrıcatask_structiçerisindekitasksdüğümüyle birbirine bağlamaktadır. Bu düğümün kökü deinit_task.taskselemanıdır.
4.10.8. Sık Sorulan Sorular
Aşağıda konuyla ilgili bazı işlemlerin bu bağlı listeler kullanılarak nasıl gerçekleştirileceğine yönelik tipik sorular ve yanıtları verilmektedir:
Soru: Bir prosesin tüm thread’leri nasıl elde edilebilir?
Bir prosesin tüm thread’leri prosesin signal yapısı içerisinde bulunan thread_head elemanı kök
yapılarak thread_node düğümlerinin dolaşılmasıyla elde edilebilir.
Soru: Bir prosesin bütün alt prosesleri nasıl elde edilebilir?
Prosesin ana thread’indeki children düğümü kök yapılarak sibling düğümlerinin dolaşılmasıyla
prosesin tüm alt prosesleri elde edilebilir.
Soru: Bir task_struct nesnesinin prosesin ana thread’ine ilişkin olup olmadığı nasıl anlaşılır?
Eğer task_struct nesnesinde pid == tgid ise bu task_struct nesnesi ilgili prosesin ana
thread’ine ilişkin task_struct nesnesidir. Zaten prosesin tüm thread’lerine ilişkin task_struct
nesnelerinde group_leader göstericisi ana thread’e ilişkin bu task_struct nesnesini
göstermektedir. O anda çalışmakta olan thread eğer prosesin ana thread’i ise current == group_leader
koşulunun sağlanacağına da dikkat ediniz.
Soru: Sistemdeki tüm proseslerin ana thread’lerine ilişkin task_struct nesneleri nasıl dolaşılır?
init_task prosesindeki tasks düğümü kök düğüm yapılıp tasks düğümleri dolaşılırsa tüm
proseslerin ana thread’lerine ilişkin task_struct nesneleri elde edilebilir.
4.11. task_struct Yapısına İlişkin Bağlı Listeler Üzerinde Gezinmelere Örnekler
Şimdi de görmüş olduğumuz task_struct yapısına ilişkin bağlı listeler üzerinde gezinme işlemlerine
örnekler verelim. Bu biçimdeki küçük testler için çekirdeği yeniden derlememize gerek yoktur. Basit bir
karakter aygıt sürücüsü yazarak da bu işlemleri yapabiliriz.
4.11.1. Geliştirme Ortamının Hazırlanması
Genellikle bir Linux sistemini yüklediğimizde zaten çekirdek modüllerini ve aygıt sürücüleri
oluşturabilmek için gereken başlık dosyaları ve diğer gerekli öğeler /usr/src dizini içerisindeki
linux-headers-$(uname -r) dizininde yüklü biçimde bulunmaktadır. Ancak bunlar yüklü değilse Debian
tabanlı sistemlerde bunları şöyle yükleyebilirsiniz:
$ sudo apt-get install linux-headers-$(uname -r)
4.11.2. Derleme ve Yükleme
Karakter aygıt sürücüleri bir ya da birden fazla kaynak .c dosyası oluşturularak yazılabilmektedir.
Aygıt sürücülerin derlenmesi oldukça karmaşık bir süreçle gerçekleşmektedir. Bu nedenle derleme işlemi
için hazır Makefile dosyaları bulundurulmuştur. Programcı kendisi bir Makefile dosyası oluşturup
asıl make dosyalarını buradan devreye sokar. Aygıt sürücüler için en basit Makefile dosyası aşağıdaki
gibi oluşturulabilir:
obj-m += ${file}.o
all:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} clean
Bu Makefile dışarıdan file isimli bir argüman almaktadır. Aygıt sürücünün derlenmesi şöyle
yapılır (kaynak dosya için uzantı belirtilmediğine dikkat ediniz):
$ make file=mydriver
Aygıt sürücüler derlendikten sonra .ko uzantılı bir dosya elde edilecektir. Bu dosya çekirdeğe
yüklenmelidir. Aygıt sürücü dosyalarını (.ko dosyalarını) çekirdeğe yüklemek için insmod ya da
modprobe komutları kullanılmaktadır. insmod komutu herhangi bir bağımlılığa bakmadan doğrudan yükleme
yapar. Biz kursumuzda aygıt sürücüleri insmod komutuyla yükleyeceğiz. Tabii aygıt sürücüleri
yükleyebilmek için root önceliğine sahip olmak gerekir. Örneğin:
$ sudo insmod mydriver.ko
insmod ile yüklenmiş olan aygıt sürücü çekirdekten rmmod komutuyla çıkartılır:
$ sudo rmmod mydriver.ko
Aygıt sürücünün yüklenip yüklenmediğini anlayabilmek için /proc/devices dosyasına başvurabilirsiniz.
4.11.3. Çekirdek Modülü ve Aygıt Sürücü Kavramları
Aygıt sürücüler çekirdek modunda çekirdeğin bir parçasıymış gibi çalışan modüllerdir. Aygıt sürücüler
içerisinde kullanıcı modundaki standart C fonksiyonları ya da POSIX fonksiyonları kullanılamaz. Aygıt
sürücüler yalnızca çekirdek içerisinde export edilmiş fonksiyonları kullanabilirler. Bir fonksiyon ya
da nesne çekirdek kodlarında EXPORT_SYMBOL makrosu ile export edilmektedir. Örneğin:
void clear_nlink(struct inode *inode)
{
if (inode->i_nlink) {
inode->__i_nlink = 0;
atomic_long_inc(&inode->i_sb->s_remove_count);
}
}
EXPORT_SYMBOL(clear_nlink);
Aslında Linux sistemlerinde bu bağlamda birbirleriyle ilişkili iki kavram vardır: Çekirdek modülleri
(kernel modules) ve aygıt sürücüler (device drivers). Çekirdeğin içerisine yüklenebilen modüllere
“çekirdek modülleri” denilmektedir. Eğer bir çekirdek modülüne kullanıcı modundan bir dosya (buna aygıt
dosyası (device file) denilmektedir) yoluyla erişilip aygıt sürücüye işlemler yaptırılabiliyorsa bu tür
çekirdek modüllerine aygıt sürücü (device driver) de denilmektedir. Yani her aygıt sürücü bir çekirdek
modülü belirtir ancak her çekirdek modülü bir aygıt sürücü belirtmek zorunda değildir. Sistemdeki yüklü
olan çekirdek modülleri /proc/modules dosyası yoluyla, yüklü olan aygıt sürücüler ise
/proc/devices dosyası yoluyla görüntülenebilmektedir.
Aşağıda iskelet bir çekirdek modülü görüyorsunuz:
#include <linux/module.h>
#include <linux/kernel.h>
MODULE_LICENSE("GPL");
static int helloworld_init(void);
static void helloworld_exit(void);
static int helloworld_init(void)
{
printk(KERN_INFO "Hello World...\n");
return 0;
}
static void helloworld_exit(void)
{
printk(KERN_INFO "Goodbye World...\n");
}
module_init(helloworld_init);
module_exit(helloworld_exit);
Bir çekirdek modülü insmod komutuyla yüklendiğinde onun module_init makrosuyla belirtilen fonksiyonu
çağrılmaktadır. Çekirdek modülü rmmod ile sistemden çıkartılırken de module_exit makrosunda
belirtilen fonksiyon çağrılmaktadır.
Çekirdek modülleri içerisinde birtakım mesajlar iletilmek isteniyorsa bu mesajlar kernel ring buffer
denilen log sistemine yazdırılmaktadır. Bu log sistemine yazdırılan yazılar dmesg komutuyla ya da
/var/log/syslog dosyası ile görüntülenebilmektedir. Çekirdek modülü içerisinde bu log sistemine
mesajlar printk isimli çekirdek fonksiyonuyla yazılmaktadır. Örneğin:
printk(KERN_INFO "Goodbye World...\n");
KERN_INFO mesajın türünü belirtmektedir. KERN_INFO ile diğer argüman arasında virgül atomunun
bulunmadığına dikkat ediniz. KERN_INFO aslında bir sembolik sabittir ve bir string açımı
yapmaktadır. (C’de yana yana iki string’in birleştirildiğini anımsayınız.) KERN_INFO mesaj türü ile
mesaj yazdırmanın daha basit yolu pr_info makrosunu kullanmaktadır:
pr_info("Goodbye World...\n");
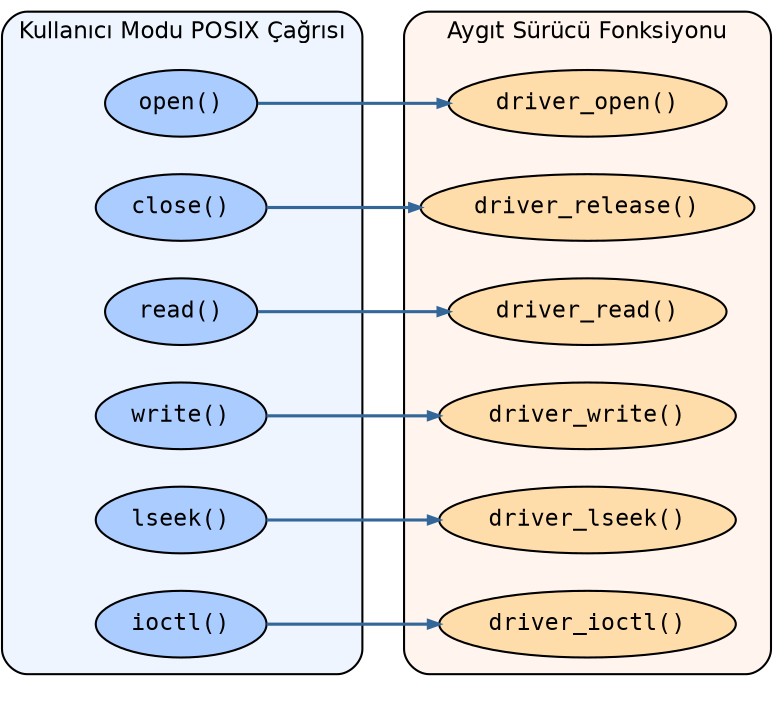
4.11.4. Aygıt Dosyaları
Aygıt sürücülere erişmekte kullanılan özel dosyalara aygıt dosyaları (device files) denilmektedir. Aygıt dosyası open POSIX fonksiyonuyla açıldığında çekirdek diske değil yüklü olan aygıt sürücüye referans etmektedir. Kullanıcı modundaki programcı aygıt dosyası üzerinde dosya işlemlerini yaptığında aslında programın akışı çekirdek moduna geçerek aygıt sürücü içerisindeki ilgili fonksiyonlar çalıştırılmaktadır:
Linux sistemlerinde aygıt sürücüler (ve dolayısıyla aygıt dosyaları) iki kısma ayrılmaktadır:
Karakter Aygıt Sürücüleri (Character Device Drivers)
Blok Aygıt Sürücüleri (Block Device Drivers)
Blok aygıt sürücüleri hard disk, SSD, CDROM, ramdisk gibi blok blok transferlerin yapıldığı aygıtlar
söz konusu olduğunda kullanılmaktadır. Karakter aygıt sürücülerine ilişkin aygıt dosyaları UNIX/Linux
sistemlerinde c dosya türü ile, blok aygıt sürücülerine ilişkin aygıt dosyaları ise b dosya türü
ile temsil edilmektedir.
UNIX/Linux sistemlerinde aygıt dosyaları genel olarak /dev dizininde bulunmaktadır. Linux
sistemlerinde udev denilen bir servis (daemon) ile bu dizinde aygıt dosyalarının yaratılması mümkün
hale getirilmiştir.
4.11.5. Aygıt Sürücülerin Majör ve Minör Numaraları
Her aygıt sürücünün majör ve minör numarası vardır. Bu majör ve minör numaralar çekirdeğin aygıt sürücüye erişebilmesi için bir adres görevi görmektedir. Majör numara aygıt sürücünün ana kodunu temsil eder. Minör numara ise onun örneklerini (instances) temsil etmektedir.
Aygıt dosyaları komut satırında mknod isimli programla yaratılmaktadır:
$ sudo mknod -m 666 mydriver c 250 0
Tipik olarak sistem programcısı bir kabuk betiği (shell script) yazarak bu işlemi otomatize eder. Bu
betik önce insmod ile aygıt sürücüyü yükler, /proc/devices dosyasına başvurup onun majör numarasını
elde eder ve aygıt dosyasını mknod komutuyla dinamik bir biçimde oluşturur. Biz de denemelerimizde
böyle yapacağız. Bunun için aşağıdaki gibi bir load betiği kullanacağız:
#!/bin/bash
# load (bu satırı dosyaya kopyalamayınız)
module=$1
mode=666
/sbin/insmod ./${module}.ko ${@:2} || exit 1
major=$(awk "\$2 == \"$module\" {print \$1}" /proc/devices)
rm -f $module
mknod -m $mode $module c $major 0
Bu betik dosyasını oluşturduktan sonra dosyaya x hakkını vermeyi unutmayınız:
$ chmod +x load
$ sudo ./load mydriver
Aygıt sürücüyü rmmod ile çıkartıp ilgili aygıt dosyasını silen unload betiği de aşağıdaki gibi yazılabilir:
#!/bin/bash
# unload (bu satırı dosyaya kopyalamayınız)
module=$1
/sbin/rmmod ./${module}.ko || exit 1
rm -f $module
$ chmod +x unload
$ sudo ./unload mydriver
4.11.6. İskelet Karakter Aygıt Sürücüsü Örneği
Aşağıda iskelet bir karakter aygıt sürücüsü oluşturulmuştur. Bu karakter aygıt sürücüsü için bir ioctl kodu da hazırlanmıştır.
test-driver.h
#ifndef TEST_DRIVER_H_
#define TEST_DRIVER_H_
#include <linux/stddef.h>
#include <linux/ioctl.h>
#define TEST_DRIVER_MAGIC 't'
#define IOC_TEST _IO(TEST_DRIVER_MAGIC, 0)
#endif
test-driver.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include "test-driver.h"
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Kaan Aslan");
MODULE_DESCRIPTION("test-driver");
static int test_driver_open(struct inode *inodep, struct file *filp);
static int test_driver_release(struct inode *inodep, struct file *filp);
static ssize_t test_driver_read(struct file *filp, char *buf, size_t size, loff_t *off);
static ssize_t test_driver_write(struct file *filp, const char *buf, size_t size, loff_t *off);
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg);
static long ioctl_test(struct file *filp, unsigned long arg);
static dev_t g_dev;
static struct cdev g_cdev;
static struct file_operations g_fops = {
.owner = THIS_MODULE,
.open = test_driver_open,
.read = test_driver_read,
.write = test_driver_write,
.release = test_driver_release,
.unlocked_ioctl = test_driver_ioctl
};
static int __init test_driver_init(void)
{
int result;
printk(KERN_INFO "test-driver module initialization...\n");
if ((result = alloc_chrdev_region(&g_dev, 0, 1, "test-driver")) < 0) {
printk(KERN_INFO "cannot alloc char driver!...\n");
return result;
}
cdev_init(&g_cdev, &g_fops);
if ((result = cdev_add(&g_cdev, g_dev, 1)) < 0) {
unregister_chrdev_region(g_dev, 1);
printk(KERN_ERR "cannot add device!...\n");
return result;
}
return 0;
}
static void __exit test_driver_exit(void)
{
cdev_del(&g_cdev);
unregister_chrdev_region(g_dev, 1);
printk(KERN_INFO "test-driver module exit...\n");
}
static int test_driver_open(struct inode *inodep, struct file *filp)
{
printk(KERN_INFO "test-driver opened...\n");
return 0;
}
static int test_driver_release(struct inode *inodep, struct file *filp)
{
printk(KERN_INFO "test-driver closed...\n");
return 0;
}
static ssize_t test_driver_read(struct file *filp, char *buf, size_t size, loff_t *off)
{
printk(KERN_INFO "test-driver read...\n");
return 0;
}
static ssize_t test_driver_write(struct file *filp, const char *buf, size_t size, loff_t *off)
{
printk(KERN_INFO "test-driver write...\n");
return 0;
}
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
long result;
printk(KERN_INFO "test_driver_ioctl...\n");
switch (cmd) {
case IOC_TEST:
result = ioctl_test(filp, arg);
break;
default:
result = -ENOTTY;
}
return result;
}
long ioctl_test(struct file *filp, unsigned long arg)
{
printk(KERN_INFO "IOC_test_driver_TEST1\n");
return 0;
}
module_init(test_driver_init);
module_exit(test_driver_exit);
Makefile
obj-m += ${file}.o
all:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} clean
load
#!/bin/bash
module=$1
mode=666
/sbin/insmod ./${module}.ko ${@:2} || exit 1
major=$(awk "\$2 == \"$module\" {print \$1}" /proc/devices)
rm -f $module
mknod -m $mode $module c $major 0
unload
#!/bin/bash
module=$1
/sbin/rmmod ./${module}.ko || exit 1
rm -f $module
Aygıt sürücüyü şöyle derleyebilirsiniz:
$ make file=test-driver
$ sudo ./load test-driver
Testi yaptıktan sonra aygıt sürücüyü çekirdekten şöyle çıkartabilirsiniz:
$ sudo ./unload test-drive
Aşağıdaki kullanıcı modu programı aygıt sürücüyü açıp ioctl kodunu çalıştırmaktadır:
app.c
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include "test-driver.h"
void exit_sys(const char *msg);
int main(void)
{
int fd;
if ((fd = open("test-driver", O_RDONLY)) == -1)
exit_sys("open");
if (ioctl(fd, IOC_TEST) == -1)
exit_sys("ioctl");
close(fd);
return 0;
}
void exit_sys(const char *msg)
{
perror(msg);
exit(EXIT_FAILURE);
}
$ gcc -Wall -o app app.c
$ ./app
app programını çalıştırdıktan sonra dmesg komutunu kullandığımızda log mesajları aşağıdaki gibi görülmelidir:
[ 431.787375] test-driver module initialization...
[ 450.631940] test-driver opened...
[ 450.631953] test_driver_ioctl...
[ 450.631958] IOC_test_driver_TEST1
[ 450.631967] test-driver closed...
4.11.7. RCU Mekanizması ile task_struct Listelerinin Dolaşılması
Biz task_struct listelerini dolaşırken çekirdek bu listelere eleman eklerse ya da bu listelerden
eleman silerse bizim dolaşım yapan kodumuzda tanımsız davranışlar (undefined behaviours) oluşabilir.
Bu da tüm sistemin çökmesine yol açabilir. Artık belli bir süredir çekirdek task_struct listeleri
üzerinde kilitsiz bir biçimde RCU (Read-Copy-Update) mekanizmasıyla işlemler yapmaktadır. Dolayısıyla
bizim de kendimizi çekirdeğin kullandığı bu RCU mekanizmasına uydurarak dolaşım yapmamız gerekir.
RCU mekanizmasının ayrıntılarını ileride ayrı başlıkta ele alacağız. Ancak bu noktada RCU mekanizması
ile task_struct listelerinin dolaşılması için bazı temel bilgileri de vereceğiz.
RCU mekanizmasıyla bağlı listeleri dolaşırken işlemin başında rcu_read_lock fonksiyonunun, işlemin sonunda da rcu_read_unlock fonksiyonunun çağrılması gerekmektedir:
#include <linux/rcupdate.h>
void rcu_read_lock(void);
void rcu_read_unlock(void);
Bizim dolaşım kodunu bu iki çağrı arasına yerleştirmemiz gerekir. RCU mekanizması altında bağlı listelerin
bağlarına erişilirken rcu_dereference makrosu kullanılmalıdır. Örneğin sistemdeki bütün proseslerin
ana thread’lerine ilişkin task_struct nesneleri aşağıdaki gibi güvenli bir biçimde dolaşılabilir:
static void walk_processes(void)
{
struct task_struct *ts;
struct list_head *lh;
rcu_read_lock();
lh = rcu_dereference(init_task.tasks.next);
while (lh != &init_task.tasks) {
ts = container_of(lh, struct task_struct, tasks);
printk(KERN_INFO "PID = %d, COMM = %s", ts->pid, ts->comm);
lh = rcu_dereference(ts->tasks.next);
}
rcu_read_unlock();
}
container_of makrosu ile list_entry makrosunun tamamen eşdeğer olduğunu anımsayınız.
task_struct içerisindeki comm elemanında en fazla 16 karakterlik task_struct nesnesini
betimleyen bir yazı bulunmaktadır. fork işlemi ya da thread yaratımı sırasında bu yazı üst prosesin
comm elemanından kopyalanmaktadır. exec işlemleri sırasında ise bu yazı çalıştırılan programın
dosya isminden hareketle değiştirilmektedir.
<linux/sched/signal.h> dosyası içerisinde next_task isimli bir makro da vardır. Bu makro bir
task_struct nesnesinin adresini parametre olarak alıp RCU mekanizmasına uygun olarak onun
tasks.next göstericisinin gösterdiği yerdeki task_struct nesnesinin adresini vermektedir:
#include <linux/sched/signal.h>
next_task(p)
Bu makro kullanılarak walk_process fonksiyonu şöyle de yazılabilir:
static void walk_processes(void)
{
struct task_struct *ts;
rcu_read_lock();
ts = next_task(&init_task);
while (ts != &init_task) {
printk(KERN_INFO "PID = %d, COMM = %s", ts->pid, ts->comm);
ts = next_task(ts);
}
rcu_read_unlock();
}
4.11.8. Tüm Prosesleri Dolaşan Çekirdek Modülü Örneği
Aşağıda tüm proseslerin ana thread’lerini dolaşan örnek bir çekirdek modülü verilmiştir.
test-module.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/rcupdate.h>
MODULE_LICENSE("GPL");
static int test_module_init(void);
static void test_module_exit(void);
static void walk_processes(void);
static int test_module_init(void)
{
printk(KERN_INFO "test_module_init...\n");
walk_processes();
return 0;
}
static void walk_processes(void)
{
struct task_struct *ts;
rcu_read_lock();
ts = next_task(&init_task);
while (ts != &init_task) {
printk(KERN_INFO "PID = %d, COMM = %s", ts->pid, ts->comm);
ts = next_task(ts);
}
rcu_read_unlock();
}
static void test_module_exit(void)
{
printk(KERN_INFO "test_module_exit...\n");
}
module_init(test_module_init);
module_exit(test_module_exit);
<linux/sched/signal.h> başlık dosyasında bulunan for_each_process isimli döngü makrosu da
tasks listesini daha kolay dolaşmak için kullanılabilmektedir. Bu makro kendi içerisinde
rcu_dereference işlemini de yapmaktadır:
rcu_read_lock();
for_each_process(ts) {
/* ... */
}
rcu_read_unlock();
Aşağıda çekirdek modülünün kodlarını bütünsel olarak veriyoruz:
test-module.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/sched/signal.h>
MODULE_LICENSE("GPL");
static int test_module_init(void);
static void test_module_exit(void);
static void walk_processes(void);
static int test_module_init(void)
{
printk(KERN_INFO "test_module_init...\n");
walk_processes();
return 0;
}
static void walk_processes(void)
{
struct task_struct *ts;
rcu_read_lock();
for_each_process(ts) {
printk(KERN_INFO "PID = %d, COMM = %s", ts->pid, ts->comm);
}
rcu_read_unlock();
}
static void test_module_exit(void)
{
printk(KERN_INFO "test_module_exit...\n");
}
module_init(test_module_init);
module_exit(test_module_exit);
Ayrıca <linux/rculist.h> dosyasında bulunan list_for_each_entry_rcu isimli döngü makrosu da
RCU mekanizmasına uygun biçimde bağlı listeleri dolaşmak için kullanılabilmektedir:
#include <linux/rculist.h>
list_for_each_entry_rcu(pos, head, member)
Bu makroyu kullanarak tüm proseslerin ana thread’lerini dolaşan fonksiyon şöyle yazılabilir:
static void walk_processes(void)
{
struct task_struct *ts;
rcu_read_lock();
list_for_each_entry_rcu(ts, &init_task.tasks, tasks) {
printk(KERN_INFO "PID = %d, COMM = %s", ts->pid, ts->comm);
}
rcu_read_unlock();
}
Aynı başlık dosyasındaki list_entry_rcu makrosu bir bağın adresini alarak RCU mekanizmasına uygun bir
biçimde bağın bulunduğu nesnenin adresini vermektedir. Aslında önceki paragraflarda gördüğümüz
next_task makrosu da bu makro kullanılarak yazılmıştır:
#define next_task(p) \
list_entry_rcu((p)->tasks.next, struct task_struct, tasks)
4.11.9. Thread Listesini Dolaşan Aygıt Sürücü Örneği
Şimdi de thread’lere ilişkin task_struct nesnelerinin dolaşılmasına örnekler verelim. Anımsanacağı
gibi yeni çekirdeklerde belli bir prosesin thread’lerine ilişkin task_struct nesneleri
signal_struct nesnesindeki thread_head düğümü kök alınarak thread_node düğümlerinin
dolaşılmasıyla elde ediliyordu.
Belli bir prosesin thread’lerinin dolaşılabilmesi için çekirdek modülü yetersiz kalmaktadır. Çünkü
çekirdek modüllerindeki fonksiyonlar dışarıdan prosesler tarafından çağrılamamaktadır. Bu nedenle thread
dolaşım testlerini ancak bir aygıt sürücü yazarak oluşturabiliriz. Aygıt sürücülerdeki fonksiyonlar
kullanıcı modundaki thread’ler tarafından çağrılabilmektedir. Bu fonksiyonlarda current makrosu
kullanıldığında ilgili fonksiyonu çağıran thread’in task_struct nesnesinin adresi elde edilecektir.
Prosesin thread’leri aşağıdaki gibi dolaşılabilir:
static void walk_process_thread(void)
{
struct task_struct *ts;
rcu_read_lock();
list_for_each_entry_rcu(ts, ¤t->signal->thread_head, thread_node) {
printk(KERN_INFO "Thread PID = %d, COMM = %s", ts->pid, ts->comm);
}
rcu_read_unlock();
}
Bir task_struct adresini alıp onun thread_node.next göstericisinin gösterdiği yerdeki
task_struct adresini veren next_thread isimli bir fonksiyon da vardır:
#include <linux/sched/signal.h>
static inline struct task_struct *next_thread(struct task_struct *p)
{
return __next_thread(p) ?: p->group_leader;
}
Bu fonksiyon ile prosesin herhangi bir thread’inden başlayarak tüm thread’leri dolaşılabilir:
static void walk_process_thread(void)
{
struct task_struct *ts;
rcu_read_lock();
ts = current;
do {
printk(KERN_INFO "Thread PID = %d, COMM = %s", ts->pid, ts->comm);
ts = next_thread(ts);
} while (ts != current);
rcu_read_unlock();
}
Aslında prosesin thread’lerini basit bir biçimde dolaşmak için for_each_thread döngü makrosu tercih
edilmektedir. Makronun birinci parametresi prosesin herhangi bir thread’inin task_struct adresini
almaktadır. Döngü her yinelendikçe yeni bir thread’e ilişkin task_struct yapının adresi ikinci
parametreyle belirtilen göstericinin içerisine yerleştirilmektedir:
#include <linux/sched/signal.h>
for_each_thread(p, t)
static void walk_process_thread(void)
{
struct task_struct *ts;
rcu_read_lock();
for_each_thread(current, ts) {
printk(KERN_INFO "Thread PID = %d, COMM = %s", ts->pid, ts->comm);
}
rcu_read_unlock();
}
Aşağıda prosesin thread’lerini dolaşan örnek aygıt sürücü kodlarının tamamı verilmiştir. Aygıt sürücüyü yükledikten
sonra app programı çalıştırmalısınız. Bu program önce 10 tane thread yaratıp sonra aygıt sürücüdeki ioctl kodunu
çalıştırmaktadır. Ekrana çıkan thread’lere ilişkin pid değerleriyle dmesg komutunun çıktısını karşılaştırınızız.
test-driver.h
#ifndef TEST_DRIVER_H_
#define TEST_DRIVER_H_
#include <linux/stddef.h>
#include <linux/ioctl.h>
#define TEST_DRIVER_MAGIC 't'
#define IOC_TEST _IO(TEST_DRIVER_MAGIC, 0)
#endif
test-driver.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include "test-driver.h"
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Kaan Aslan");
MODULE_DESCRIPTION("test-driver");
static int test_driver_open(struct inode *inodep, struct file *filp);
static int test_driver_release(struct inode *inodep, struct file *filp);
static ssize_t test_driver_read(struct file *filp, char *buf, size_t size, loff_t *off);
static ssize_t test_driver_write(struct file *filp, const char *buf, size_t size, loff_t *off);
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg);
static long ioctl_test(struct file *filp, unsigned long arg);
static void walk_process_thread(void);
static dev_t g_dev;
static struct cdev g_cdev;
static struct file_operations g_fops = {
.owner = THIS_MODULE,
.open = test_driver_open,
.read = test_driver_read,
.write = test_driver_write,
.release = test_driver_release,
.unlocked_ioctl = test_driver_ioctl
};
static int __init test_driver_init(void)
{
int result;
printk(KERN_INFO "test-driver module initialization...\n");
if ((result = alloc_chrdev_region(&g_dev, 0, 1, "test-driver")) < 0) {
printk(KERN_INFO "cannot alloc char driver!...\n");
return result;
}
cdev_init(&g_cdev, &g_fops);
if ((result = cdev_add(&g_cdev, g_dev, 1)) < 0) {
unregister_chrdev_region(g_dev, 1);
printk(KERN_ERR "cannot add device!...\n");
return result;
}
return 0;
}
static void __exit test_driver_exit(void)
{
cdev_del(&g_cdev);
unregister_chrdev_region(g_dev, 1);
printk(KERN_INFO "test-driver module exit...\n");
}
static int test_driver_open(struct inode *inodep, struct file *filp)
{
printk(KERN_INFO "test-driver opened...\n");
return 0;
}
static int test_driver_release(struct inode *inodep, struct file *filp)
{
printk(KERN_INFO "test-driver closed...\n");
return 0;
}
static ssize_t test_driver_read(struct file *filp, char *buf, size_t size, loff_t *off)
{
printk(KERN_INFO "test-driver read...\n");
return 0;
}
static ssize_t test_driver_write(struct file *filp, const char *buf, size_t size, loff_t *off)
{
printk(KERN_INFO "test-driver write...\n");
return 0;
}
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
long result;
printk(KERN_INFO "test_driver_ioctl...\n");
switch (cmd) {
case IOC_TEST:
result = ioctl_test(filp, arg);
break;
default:
result = -ENOTTY;
}
return result;
}
long ioctl_test(struct file *filp, unsigned long arg)
{
walk_process_thread();
return 0;
}
static void walk_process_thread(void)
{
struct task_struct *ts;
rcu_read_lock();
for_each_thread(current, ts) {
printk(KERN_INFO "Thread PID = %d, COMM = %s", ts->pid, ts->comm);
}
rcu_read_unlock();
}
module_init(test_driver_init);
module_exit(test_driver_exit);
Makefile
obj-m += ${file}.o
all:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} clean
load
#!/bin/bash
module=$1
mode=666
/sbin/insmod ./${module}.ko ${@:2} || exit 1
major=$(awk "\$2 == \"$module\" {print \$1}" /proc/devices)
rm -f $module
mknod -m $mode $module c $major 0
unload
#!/bin/bash
module=$1
/sbin/rmmod ./${module}.ko || exit 1
rm -f $module
app.c
#define _GNU_SOURCE
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdint.h>
#include <fcntl.h>
#include <unistd.h>
#include <pthread.h>
#include <sys/ioctl.h>
#include "test-driver.h"
#define NTHREADS 10
void exit_sys(const char *msg);
void *thread_proc(void *param);
int main(void)
{
int fd;
int result;
pthread_t tids[NTHREADS];
for (int i = 0; i < NTHREADS; ++i) {
if ((result = pthread_create(&tids[i], NULL, thread_proc, NULL)) != 0) {
fprintf(stderr, "pthread_create: %s\n", strerror(result));
exit(EXIT_FAILURE);
}
}
if ((fd = open("test-driver", O_RDONLY)) == -1)
exit_sys("open");
if (ioctl(fd, IOC_TEST) == -1)
exit_sys("ioctl");
close(fd);
for (int i = 0; i < NTHREADS; ++i)
pthread_join(tids[i], NULL);
return 0;
}
void *thread_proc(void *param)
{
printf("Thread PID: %jd\n", (intmax_t)gettid());
sleep(120);
return NULL;
}
void exit_sys(const char *msg)
{
perror(msg);
exit(EXIT_FAILURE);
}
4.11.10. Tüm task_struct Nesnelerinin Dolaşılması
Peki sistemdeki bütün task_struct nesnelerini dolaşabilir miyiz? Bunu yapmanın en pratik yolu
init_task nesnesinden hareketle tüm proseslerin ana thread’lerine ilişkin task_struct nesnelerini
elde edip o ana thread’lerden faydalanarak onların diğer thread’lerine ilişkin task_struct nesnelerini
elde etmektir. Aslında bunu iç içe iki döngü oluşturarak RCU mekanizması eşliğinde yapan
for_each_process_thread isimli bir makro vardır:
#include <linux/sched/signal.h>
#define for_each_process_thread(p, t) \
for_each_process(p) for_each_thread(p, t)
Makroya biz iki task_struct göstericisi veririz. Makro her yinelemede prosesin ana thread’ine
ilişkin task_struct nesnesinin adresini birinci parametreyle verilen göstericinin içerisine, o
prosesin thread’lerine ilişkin task_struct nesnelerinin adresleri de ikinci parametreyle verilen
göstericinin içerisine yerleştirmektedir. O halde tüm thread’lere ilişkin task_struct nesneleri
aşağıdaki gibi elde edilebilir:
static void walk_all_threads(void)
{
struct task_struct *tsp;
struct task_struct *tst;
rcu_read_lock();
for_each_process_thread(tsp, tst) {
printk(KERN_INFO "Process Main Thread PID = %d, Thread PID == %d COMM = %s\n",
tsp->pid, tst->pid, tst->comm);
}
rcu_read_unlock();
}
Tabii proseslerin thread’lerini girinti biçimde göstermek için kodu aşağıdaki gibi de düzenleyebiliriz:
static void walk_all_threads(void)
{
struct task_struct *tsp;
struct task_struct *tst;
rcu_read_lock();
for_each_process_thread(tsp, tst) {
if (tsp == tst) {
printk(KERN_INFO "Process Main Thread PID = %d, COMM = %s\n", tsp->pid, tst->comm);
}
else {
printk(KERN_INFO "Thread PID == %d COMM = %s\n", tst->pid, tst->comm);
}
}
rcu_read_unlock();
}
dmesg çıktısı aşağıdakine benzer biçimde elde edilecektir:
...
[ 6022.928026] Process Main Thread PID = 3494, COMM = kworker/u257:2
[ 6022.928027] Process Main Thread PID = 3997, COMM = kworker/1:0
[ 6022.928042] Process Main Thread PID = 4271, COMM = kworker/0:0
[ 6022.928044] Process Main Thread PID = 4279, COMM = kworker/u259:0
[ 6022.928045] Process Main Thread PID = 4543, COMM = kworker/3:1
[ 6022.928048] Process Main Thread PID = 4546, COMM = kworker/5:2
[ 6022.928049] Process Main Thread PID = 4547, COMM = kworker/u264:2
[ 6022.928051] Process Main Thread PID = 4565, COMM = bash
[ 6022.928053] Process Main Thread PID = 4599, COMM = app
[ 6022.928054] Thread PID == 4600 COMM = app
[ 6022.928056] Thread PID == 4601 COMM = app
[ 6022.928057] Thread PID == 4602 COMM = app
[ 6022.928059] Thread PID == 4603 COMM = app
[ 6022.928060] Thread PID == 4604 COMM = app
[ 6022.928062] Thread PID == 4605 COMM = app
[ 6022.928064] Thread PID == 4606 COMM = app
[ 6022.928081] Thread PID == 4607 COMM = app
[ 6022.928083] Thread PID == 4608 COMM = app
[ 6022.928084] Thread PID == 4609 COMM = app
[ 6022.928087] Process Main Thread PID = 4610, COMM = sudo
[ 6022.928089] Process Main Thread PID = 4611, COMM = sudo
[ 6022.928090] Process Main Thread PID = 4612, COMM = insmod
...
Aşağıda bu işlemi yapan çekirdek modülünün tüm kodları verilmiştir.
test-module.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/sched/signal.h>
MODULE_LICENSE("GPL");
static int test_module_init(void);
static void test_module_exit(void);
static void walk_all_threads(void);
static int test_module_init(void)
{
printk(KERN_INFO "test_module_init...\n");
walk_all_threads();
return 0;
}
static void walk_all_threads(void)
{
struct task_struct *tsp;
struct task_struct *tst;
rcu_read_lock();
for_each_process_thread(tsp, tst) {
if (tsp == tst) {
printk(KERN_INFO "Process Main Thread PID = %d, COMM = %s\n", tsp->pid, tst->comm);
}
else {
printk(KERN_INFO "Thread PID == %d COMM = %s\n", tst->pid, tst->comm);
}
}
rcu_read_unlock();
}
static void test_module_exit(void)
{
printk(KERN_INFO "test_module_exit...\n");
}
module_init(test_module_init);
module_exit(test_module_exit);
Makefile
obj-m += ${file}.o
all:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} clean
4.11.11. Alt Proses Listesininin Dolaşılması
Şimdi de son olarak bir prosesin alt proseslerini dolaşalım. Anımsanacağı gibi prosesin alt proses
listesinin kök düğümü ana prosesin ana thread’ine ilişkin task_struct nesnesinin children
elemanında tutuluyordu. Bu children elemanı task_struct içerisindeki sibling düğümlerini
dolaşmakta kullanılıyordu. children/sibling listesinde yalnızca alt proseslerin ana thread’lerine
ilişkin task_struct nesnelerinin bulunduğunu da anımsayınız.
Alt prosesleri dolaşan hazır bir döngü makrosu yoktur. Ancak biz yukarıdaki tekniklerle dolaşımı
yapabiliriz. Örneğin bunun için RCU mekanizmasıyla bağlı listeyi dolaşan list_for_each_entry_rcu
döngü makrosundan faydalanabiliriz:
static void walk_child_processes(void)
{
struct task_struct *ts;
rcu_read_lock();
list_for_each_entry_rcu(ts, ¤t->children, sibling) {
printk(KERN_INFO "Child Process Main Thread PID = %d, COMM = %s\n", ts->pid, ts->comm);
}
rcu_read_unlock();
}
Bu kodda current makrosunun belirttiği prosesin alt proses listesi dolaşılmaktadır. Tabii daha
önce de belirttiğimiz gibi alt proseslerin dolaşılması prosesin ana thread’inden hareketle yapılmalıdır.
Yukarıdaki fonksiyonda current makrosu kullanıldığı için biz dolaşımı basit bir çekirdek modülü
ile yapamayız, ancak bir aygıt sürücü yoluyla yapabiliriz. Bir karakter aygıt sürücüsü oluşturarak
yukarıdaki fonksiyonu onun ioctl kodu içerisinden çağırabiliriz:
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
long result;
printk(KERN_INFO "test_driver_ioctl...\n");
switch (cmd) {
case IOC_TEST:
result = ioctl_test(filp, arg);
break;
default:
result = -ENOTTY;
}
return result;
}
long ioctl_test(struct file *filp, unsigned long arg)
{
walk_child_processes();
return 0;
}
Kodu önce çeşitli alt prosesler yarattıktan sonra aygıt sürücü üzerinde ioctl çağrısı yapan bir
programla test edebilirsiniz. Biz test işlemini yapan app.c programında 10 tane alt proses ve her
alt proseste 3 tane thread yarattık. Aygıt sürücüyü yükleyip app.c programını derleyip çalıştırdıktan
sonra dmesg komutunu uygulayarak çıktıyı incelemelisiniz.
Not
Çekirdeğin uyguladığı RCU mekanizması tek bir yazan ve birden fazla okuyan akışın bulunduğu durumda
beklemeyi ortadan kaldırmaktadır. Ancak veri yapısına birden fazla yazanın olması durumunda yazan
tarafların bir kilit mekanizmasıyla senkronize edilmesi gerekir. İşte güncel çekirdekler hala
task_struct bağlı listelerine yazma için tasklist_lock kilidini kullanmaktadır. tasklist_lock
okuma yazma kilidi artık çekirdek modülleri ve aygıt sürücüler için export edilmemektedir.
Aşağıda tüm kodları bütünsel olarak veriyoruz:
test-driver.h
#ifndef TEST_DRIVER_H_
#define TEST_DRIVER_H_
#include <linux/stddef.h>
#include <linux/ioctl.h>
#define TEST_DRIVER_MAGIC 't'
#define IOC_TEST _IO(TEST_DRIVER_MAGIC, 0)
#endif
test-driver.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include "test-driver.h"
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Kaan Aslan");
MODULE_DESCRIPTION("test-driver");
static int test_driver_open(struct inode *inodep, struct file *filp);
static int test_driver_release(struct inode *inodep, struct file *filp);
static ssize_t test_driver_read(struct file *filp, char *buf, size_t size, loff_t *off);
static ssize_t test_driver_write(struct file *filp, const char *buf, size_t size, loff_t *off);
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg);
static long ioctl_test(struct file *filp, unsigned long arg);
static void walk_child_processes(void);
static dev_t g_dev;
static struct cdev g_cdev;
static struct file_operations g_fops = {
.owner = THIS_MODULE,
.open = test_driver_open,
.read = test_driver_read,
.write = test_driver_write,
.release = test_driver_release,
.unlocked_ioctl = test_driver_ioctl
};
static int __init test_driver_init(void)
{
int result;
printk(KERN_INFO "test-driver module initialization...\n");
if ((result = alloc_chrdev_region(&g_dev, 0, 1, "test-driver")) < 0) {
printk(KERN_INFO "cannot alloc char driver!...\n");
return result;
}
cdev_init(&g_cdev, &g_fops);
if ((result = cdev_add(&g_cdev, g_dev, 1)) < 0) {
unregister_chrdev_region(g_dev, 1);
printk(KERN_ERR "cannot add device!...\n");
return result;
}
return 0;
}
static void __exit test_driver_exit(void)
{
cdev_del(&g_cdev);
unregister_chrdev_region(g_dev, 1);
printk(KERN_INFO "test-driver module exit...\n");
}
static int test_driver_open(struct inode *inodep, struct file *filp)
{
printk(KERN_INFO "test-driver opened...\n");
return 0;
}
static int test_driver_release(struct inode *inodep, struct file *filp)
{
printk(KERN_INFO "test-driver closed...\n");
return 0;
}
static ssize_t test_driver_read(struct file *filp, char *buf, size_t size, loff_t *off)
{
printk(KERN_INFO "test-driver read...\n");
return 0;
}
static ssize_t test_driver_write(struct file *filp, const char *buf, size_t size, loff_t *off)
{
printk(KERN_INFO "test-driver write...\n");
return 0;
}
static long test_driver_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
long result;
printk(KERN_INFO "test_driver_ioctl...\n");
switch (cmd) {
case IOC_TEST:
result = ioctl_test(filp, arg);
break;
default:
result = -ENOTTY;
}
return result;
}
long ioctl_test(struct file *filp, unsigned long arg)
{
walk_child_processes();
return 0;
}
static void walk_child_processes(void)
{
struct task_struct *ts;
rcu_read_lock();
list_for_each_entry_rcu(ts, ¤t->children, sibling) {
printk(KERN_INFO "Child Process Main Thread PID = %d, COMM = %s\n", ts->pid, ts->comm);
}
rcu_read_unlock();
}
module_init(test_driver_init);
module_exit(test_driver_exit);
Makefile
obj-m += ${file}.o
all:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=${PWD} clean
load
#!/bin/bash
module=$1
mode=666
/sbin/insmod ./${module}.ko ${@:2} || exit 1
major=$(awk "\$2 == \"$module\" {print \$1}" /proc/devices)
rm -f $module
mknod -m $mode $module c $major 0
unload
#!/bin/bash
module=$1
/sbin/rmmod ./${module}.ko || exit 1
rm -f $module
app.c
#define _GNU_SOURCE
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdint.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/wait.h>
#include <pthread.h>
#include <sys/ioctl.h>
#include "test-driver.h"
#define NCHILDS 10
#define NTHREADS 3
void exit_sys(const char *msg);
void *thread_proc(void *param);
int main(void)
{
int fd;
int result;
pid_t pid;
for (int i = 0; i < NCHILDS; ++i) {
if ((pid = fork()) == -1) {
perror("fork");
exit(EXIT_FAILURE);
}
if (pid == 0) {
pthread_t tids[NTHREADS];
for (int k = 0; k < NTHREADS; ++k) {
if ((result = pthread_create(&tids[k], NULL, thread_proc, NULL)) != 0) {
fprintf(stderr, "pthread_create: %s\n", strerror(result));
exit(EXIT_FAILURE);
}
}
for (int k = 0; k < NTHREADS; ++k)
pthread_join(tids[k], NULL);
_exit(0);
}
else {
printf("Child PID = %jd\n", (intmax_t)pid);
}
}
if ((fd = open("test-driver", O_RDONLY)) == -1)
exit_sys("open");
if (ioctl(fd, IOC_TEST) == -1)
exit_sys("ioctl");
close(fd);
for (int i = 0; i < NCHILDS; ++i)
if (wait(NULL) == -1) {
perror("fork");
exit(EXIT_FAILURE);
}
return 0;
}
void *thread_proc(void *param)
{
sleep(60);
return NULL;
}
void exit_sys(const char *msg)
{
perror(msg);
exit(EXIT_FAILURE);
}
4.12. PID Tahsisatı
Şimdi de pid değerleriyle task_struct nesneleri arasındaki ilişkiyi ele alalım. Bilindiği gibi
kullanıcı modunda prosesler pid değerleriyle temsil edilmektedir. Örneğin pid parametresi alan tipik
POSIX fonksiyonları şunlardır: kill, waitpid, getpgid, setpgid, getsid, getpriority,
setpriority.
O halde çekirdeğin pid değerinden hareketle o pid değerine ilişkin task_struct nesnesini hızlı bir
biçimde elde etmesi gerekmektedir. Bu bağlamda çekirdek geliştiricisinin aşağıdaki iki sorunun yanıtını
biliyor olması gerekir:
Yeni bir proses ya da thread yaratıldığında çekirdek o proses ya da thread’e ilişkin pid değerini nasıl üretmektedir?
Çekirdek belli bir pid değerine ilişkin proses ya da thread’in
task_structnesnesine nasıl ulaşmaktadır?
4.12.1. PID Üretim Mekanizmasının Tarihsel Gelişimi
Bir task_struct nesnesi çekirdek tarafından yaratıldığında ona atanacak pid değeri eskiden oldukça
basit bir biçimde belirleniyordu. Linux 0.01 versiyonundaki find_empty_process fonksiyonu bu bakımdan
çok ilkeldi:
int find_empty_process(void)
{
int i;
repeat:
if ((++last_pid) < 0) last_pid = 1;
for (i = 0; i < NR_TASKS; i++)
if (task[i] && task[i]->pid == last_pid) goto repeat;
for (i = 1; i < NR_TASKS; i++)
if (!task[i])
return i;
return -EAGAIN;
}
Bu ilk versiyonda gördüğünüz gibi sistemde tahsis edilebilecek en fazla task_struct nesnesi 64 kadardı
(NR_TASKS = 64). Zaten bu versiyonda 64 tane task_struct yapısı baştan statik olarak tahsis
edilmişti:
struct task_struct *task[NR_TASKS] = {&(init_task.task), };
2.4 çekirdeğinde pid numarasının belirlenmesi işlemi belli bir değerden itibaren aday olan pid değerlerinin
herhangi bir task_struct nesnesi tarafından kullanılıp kullanılmadığına bakılarak yapılmıştır. Bu
versiyondaki get_pid fonksiyonu tüm task_struct nesnelerini dolaşarak boş bir pid değerini doğrusal
aramayla tespit etmeye çalışmaktadır.
pid araması 2.6 çekirdekleriyle birlikte bitmap veri yapısı kullanılarak elde edilmeye başlanmıştır. Bitmap veri yapısı bitleri tutan bir veri yapısıdır. Modern işlemcilerde belli bir adresten itibaren 0 olan ilk bitin yerini veren makine komutları bulunmaktadır. Bu veri yapısı kullanılarak boş bir pid değeri elde eden fonksiyondaki kilit satır şudur:
offset = find_next_offset(map, offset);
find_next_offset fonksiyonu bitmap’teki ilk boş olan 0 bitinin offset değerini bulan özel makine komutu kullanılarak yazılmıştır. Kursumuzda bitmap veri yapısını ileride ayrı bir başlık altında inceleyeceğiz.
Çekirdeğin 4.15 versiyonu ile pid tahsisatında bitmap kullanımı bırakılarak radix ağaçları kullanılmaya
başlanmıştır. Güncel çekirdekler ise boş pid değerinin üretimi için artık radix ağaçlarının özel bir
biçimi olan XArray veri yapısını kullanmaktadır. Güncel çekirdeklerde boş pid değerini bu karmaşık
yöntemle elde eden alloc_pid isimli yüksek seviyeli bir fonksiyon bulunmaktadır:
struct pid *alloc_pid(struct pid_namespace *ns, pid_t *set_tid, size_t set_tid_size);
4.12.2. Maksimum PID Değeri
Linux çekirdekleri maksimum pid değeri için bir üst limit kullanmaktadır. 2.6 ve günümüze kadarki
çekirdeklerde PID_MAX_LIMIT sembolik sabiti şöyle bildirilmiştir:
#define PID_MAX_LIMIT (IS_ENABLED(CONFIG_BASE_SMALL) ? PAGE_SIZE * 8 : \
(sizeof(long) > 4 ? 4 * 1024 * 1024 : PID_MAX_DEFAULT))
Görüldüğü gibi CONFIG_BASE_SMALL konfigürasyon parametresi n yapılmış ve 64 bit sistemlerde bu
limit 4 × 1024 × 1024 = 4.194.304 değerini belirtmektedir. 32 bit sistemlerde ise bu değer PID_MAX_DEFAULT
yani 32.768’dir.
Bugün kullandığımız 64 bitlik işlemcilerdeki Linux sistemlerinde maksimum pid değeri 4.194.304, 32 bit
sistemlerde ise 32.767 biçimindedir. Bu değer proc dosya sisteminde /proc/sys/kernel/pid_max
dosyasında da belirtilmektedir. Programcı isterse sysctl komutu yoluyla sistem çalışırken bu değeri
düşürebilir ancak yükseltemez.
Sisteminizde tahsis edilebilecek maksimum task_struct nesnelerinin sayısını (yani maksimum thread
sayısını) /proc/sys/kernel/threads-max dosyasından öğrenebilirsiniz. Bu değer sistem çalışırken de
değiştirilebilir:
$ echo 100000 | sudo tee /proc/sys/kernel/threads-max
4.13. PID’den task_struct Nesnesine Hızlı Erişim
“Çekirdek belli bir pid değerine ilişkin task_struct adresini nasıl hızlı bir biçimde elde
etmektedir?” sorusuna yanıt verelim. Düz mantıkla sistemdeki bütün task_struct nesneleri dolaşılarak
elde edilebilir. Ancak böyle bir arama çekirdek için çok yavaştır. Bu tür hızlı aramalar için Linux
çekirdeğinde genel olarak hash tabloları, bazen de arama ağaçları kullanılmaktadır.
Linux’un 2.6.24 versiyonuna kadar bunun için hash tabloları kullanılıyordu. Ancak bu versiyondan itibaren bu amaçla radix ağaçları da işin içine sokulmuştur. Güncel çekirdeklerdeki arama sistemi radix ağaçlarının özel bir biçimi olan XArray veri yapısı ve hash tablolarının hibrit bir biçimine benzemektedir. Biz kursumuzun bu noktasında Linux çekirdeğinde hash tablolarının gerçekleştirimi üzerinde duracağız.
Çekirdeğin ilk 0.01 versiyonunda zaten en fazla 64 tane task_struct nesnesi oluşturulabiliyordu.
Bu versiyonda pid değerine ilişkin task_struct nesnesinin bulunması için bu task_struct
nesnelerinin tutulduğu task isimli global dizide sıralı arama yapılmıştır.
Çekirdeğin 2.2 versiyonlarında pid değerinden hareketle task_struct nesnesinin bulunması için hash
tablosu kullanılmıştır. Bu versiyonlarda bu işi yapan find_task_by_pid fonksiyonu aşağıdaki gibi
yazılmıştır:
extern __inline__ struct task_struct *find_task_by_pid(int pid)
{
struct task_struct *p, **htable = &pidhash[pid_hashfn(pid)];
for (p = *htable; p && p->pid != pid; p = p->pidhash_next)
;
return p;
}
Bu versiyonlarda henüz daha sonra açıkladığımız hlist hash tablosu fonksiyonları çekirdekte
bulunmuyordu. find_task_by_pid fonksiyonunda önce pid değeri pid_hashfn isimli bir hash
fonksiyonuna sokularak bir indeks değeri elde edilmiş, sonra da pidhash dizisinin bu indeksteki
bağlı liste zincirinde arama yapılmıştır. pidhash dizisi şöyle tanımlanmıştır:
struct task_struct *pidhash[PIDHASH_SZ];
Görüldüğü gibi hash tablosundaki zincirler doğrudan task_struct nesnelerini tutmaktadır. Bu
versiyonlarda bu zincirler için task_struct içerisinde iki link elemanı bulunduruluyordu:
struct task_struct {
/* ... */
struct task_struct *pidhash_next;
struct task_struct **pidhash_pprev;
/* ... */
};
Çekirdeğin 2.4 versiyonunda da algoritmada ve yukarıdaki fonksiyonda bir değişiklik yapılmamıştır. Yani yine bir hash tablosu eşliğinde arama yapılmaktadır.
4.13.1. 2.6 Versiyonu: pid Nesnesi ve Bağlı Listeler
Çekirdeğin 2.6’lı versiyonlarında artık her farklı pid değeri için o pid değerine ilişkin bir
pid nesnesi (struct pid nesnesi) oluşturulmaya başlanmıştır. Bu versiyonlarda çekirdek her
farklı pid değeri için bir pid nesnesi oluşturup bu pid nesnelerini de hash tablolarında
saklamaktadır. Her pid nesnesi de aşağıda açıklayacağımız gibi bir grup bağlı listenin kök
düğümlerini tutmaktadır. Bu versiyonlarda bir pid değerine ilişkin task_struct nesnesini bulmak
için çekirdek önce hash tablosundan o pid değerine ilişkin pid nesnesini elde etmekte, sonra o
pid nesnesinin içerisindeki bağlı listelerde arama yapmaktadır:

2.6’lı versiyonlardaki pid yapısı şöyleydi:
struct pid {
atomic_t count;
unsigned int level;
/* lists of tasks that use this pid */
struct hlist_head tasks[PIDTYPE_MAX];
struct rcu_head rcu;
struct upid numbers[1];
};
Bu versiyonlardaki durumu şöyle özetleyebiliriz:
Çekirdek her pid için bir
pidnesnesi (struct pidnesnesi) oluşturup onu bir hash tablosunda saklamaktadır. Yanipidnesneleri için bir hash tablosu kullanılmıştır.pidyapısının içerisindekitaskselemanı o pid değerine ilişkin bağlı liste zincirlerinin kök düğümlerini tutmaktadır.Sistem bir pid değerine ilişkin
task_structnesnesini elde etmek için önce o pid değerine ilişkinpidnesnesini hash tablosundan bulmakta, sonra onun içerisindeki ilgili bağlı listede arama yapmaktadır.
2.6 çekirdekleriyle birlikte Linux’a isim alanları (name spaces) kavramı da sokulmaya başlanmıştır. Bu versiyonlar artık pid değerleri için bir isim alanı da kullanmaktadır. Pid isim alanı sayesinde sanki çekirdek birden fazla pid dünyasına sahip gibi bir etki oluşturulmaktadır. Pid isim alanları iç içe de oluşturulabilmektedir. Artık bu versiyonlarla birlikte pid değerleri sistem genelinde tek değil isim alanı genelinde tektir. Linux çekirdeğine eklenen bu isim alanları özelliği docker gibi container teknolojilerinin gelişmesine katkı sağlamıştır.
4.13.2. pid_type Enum Değerleri ve Bağlı Listeler
pid yapısındaki tasks dizisinin PIDTYPE_MAX kadar elemana sahip olduğunu görüyorsunuz.
PIDTYPE_MAX aşağıdaki gibi bir enum türünün elemanıdır:
/* 2.6'lı versiyonlar */
enum pid_type {
PIDTYPE_PID,
PIDTYPE_PGID,
PIDTYPE_SID,
PIDTYPE_MAX /* = 3 */
};
/* Güncel versiyonlar */
enum pid_type {
PIDTYPE_PID,
PIDTYPE_TGID,
PIDTYPE_PGID,
PIDTYPE_SID,
PIDTYPE_MAX /* = 4 */
};
Daha sonra PIDTYPE_TGID ile temsil edilen bir bağlı listenin daha eklendiğine dikkat ediniz.
Peki pid değerini saklamak için neden birden fazla bağlı liste kullanılmaktadır? İşte 2.6’lı
çekirdeklerle birlikte bu tarz aramalarda hız kazancı sağlamak için tasarım değiştirilmiştir.
Aşağıdaki diyagram her listenin hangi task_struct nesnelerini tuttuğunu göstermektedir:
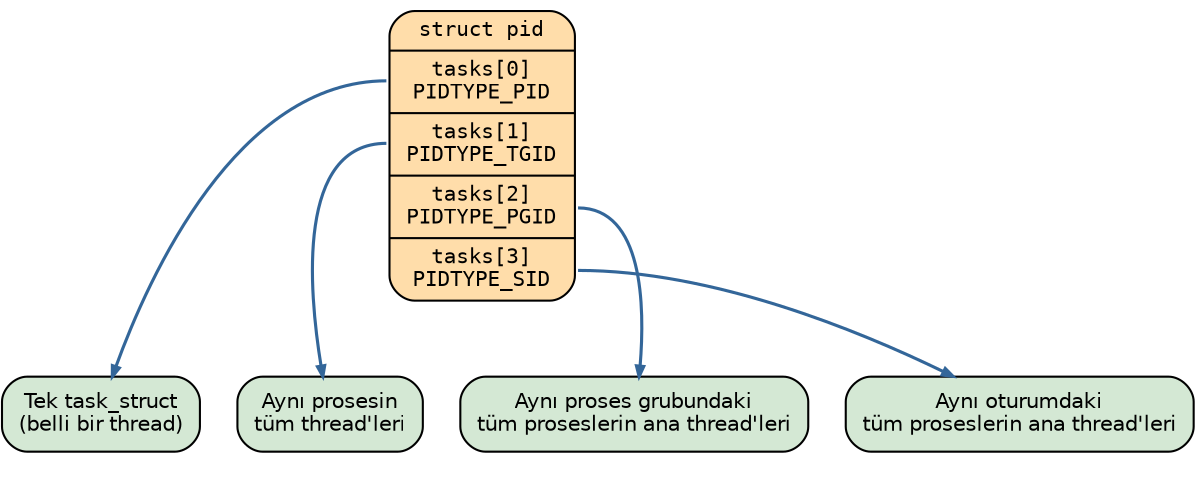
Bu bağlı listeleri daha ayrıntılı açıklayalım:
PIDTYPE_PID: Bu bağlı liste zincirinde aslında tek bir eleman vardır. Amacımız yalnızca belli bir pid değerine ilişkin
task_structnesnesinin adresinin bulunmasıysa hemen bu listenin ilk elemanını alabiliriz.PIDTYPE_TGID: Bu bağlı liste belli bir prosesin thread’lerini dolaşmak için kullanılmaktadır. Bu bağlı listedeki tüm
task_structnesneleri aynı prosesin thread’lerini oluşturmaktadır. Yani biz çekirdeğe bir prosesin ana thread’ine ilişkin bir pid değeri verdiğimizde çekirdek bu bağlı liste zincirini dolaşarak o prosesin tüm thread’lerinintask_structadreslerini elde edebilmektedir.PIDTYPE_PGID: Aynı proses grubuna ilişkin proseslerin ana thread’lerinin
task_structnesnelerini tutmaktadır. Yani aranan pid değeri bir proses grup liderine ilişkin pid belirtiyorsa bu zincirde o proses grubundaki tüm proseslerin ana thread’lerinintask_structnesnelerinin adresleri bulunmaktadır.PIDTYPE_SID: Belli bir oturuma (session) ilişkin tüm proseslerin (onların ana thread’lerinin)
task_structnesnelerinin adreslerini tutmaktadır.
2.6 versiyonlarından önce tek bir hash tablosu vardı. Bu nedenle proses grubundaki proseslerin
task_struct nesneleri ancak tüm task_struct nesneleri dolaşılarak elde edilebiliyordu.
Halbuki 2.6’daki bu tasarımla bu biçimdeki dolaşımlar bu hash tablosu ve bağlı listeler yoluyla çok
daha hızlı yapılabilmektedir.
Aşağıda 2.6 versiyonlarında pid değerinden task_struct nesnesine ulaşım çağrı zinciri
görülmektedir:

Hash tablosunda pid nesnesini arayan find_pid_ns fonksiyonu, upid yapı nesnelerini dolaşmakta
ve hem pid değerine hem de pid isim alanına birlikte bakmaktadır:
struct upid {
int nr;
struct pid_namespace *ns;
struct hlist_node pid_chain;
};
static struct hlist_head *pid_hash; /* global hash tablosu */
struct pid *find_pid_ns(int nr, struct pid_namespace *ns)
{
struct hlist_node *elem;
struct upid *pnr;
hlist_for_each_entry_rcu(pnr, elem,
&pid_hash[pid_hashfn(nr, ns)], pid_chain)
if (pnr->nr == nr && pnr->ns == ns)
return container_of(pnr, struct pid, numbers[ns->level]);
return NULL;
}
Burada hlist_node bağının upid nesnesinin içerisinde olduğuna, upid nesnesinin de pid
nesnesinin içerisinde olduğuna dikkat ediniz.
4.13.3. 4.20 Versiyonu: Hash Tablosundan XArray’e Geçiş
Çekirdek versiyonu 4.20’lere geldiğinde yukarıdaki mekanizmada önemli değişiklikler yapılmıştır. En
önemli değişiklik pid ve isim alanından hareketle pid nesnesinin bulunması işleminde hash tablosu
yerine radix ağacının kullanılmaya başlanmasıdır. Aslında 2.5 ile birlikte çekirdekte başka alt
sistemlerde radix ağacı kullanılmaya başlanmıştı. Sonra bu radix ağaçlarının 4.20 versiyonuyla birlikte
XArray isimli yeni bir gerçekleştirimi yapılmıştır.
4.20 ve sonrasında pid yapısındaki bağlı listelerde bir farklılık yoktur. Yalnızca pid ve isim alanı
bilgisinden hareketle pid yapı nesnesinin elde edilmesinde hash tablosu yerine radix ağacı (XArray
gerçekleştirimi) kullanılmaktadır.
Bu bağlamda pid mekanizmasında radix ağacının hash tablosuna tercih edilmesinin tipik nedenleri şunlardır:
Radix ağacındaki arama hash tablolarından yavaş gözükse bile aslında pratikte durum tam böyle değildir. Buradaki radix ağacı seyrek tutulmaktadır. Bu yüzden arama hızlı yapılır.
pid’leri artan sırayla gezmek, boş pid bulmak (en küçük kullanılmayan pid’i seçmek) çok daha kolaydır.
Ağaçta yalnızca kullanılan düğümler tutulmaktadır. Bu da bellek kazancı sağlamaktadır.
pid sayısı arttıkça hash tablosunun performansı düşme eğilimi gösterdiği halde radix ağacının performansı hash tablosuna kıyasla düşmez.
Radix ağacı yalnızca pid araması için değil, aynı zamanda yeni yaratılan
task_structnesneleri için pid tahsis edilmesinde de kullanılabilmektedir.
Güncel çekirdeklerde hem pid aramaları hem de boş pid değerlerinin tespit edilmesi işlemleri bu XArray gerçekleştirimi ile sağlanmaktadır.
4.13.4. Radix Ağaçlarının Kullanılması
Biz radix arama ağacını ve XArray gerçekleştirimini daha sonra başka bir bölümde ele alacağız. Burada yalnızca radix arama ağacının temel mekanizması üzerinde açıklamalar yapacağız. Radix arama ağaçları için sayısal arama ağaçları (digital search tree), önek arama ağacı (prefix search tree), sıkıştırılmış arama ağaçları (compressed search trie) gibi isimler de kullanılmaktadır.
Bu arama ağaçlarında düğümlerde anahtar olarak anahtarın tamamı değil onun ön kısımları bulundurulmaktadır.
Böylece ağaç bir leksikografik sıralama ağacı gibi de kullanılabilmektedir. Örneğin 4 bitlik şu sayıların
radix ağacına yerleştirilmek istendiğini düşünelim: 1100, 1010, 0101, 1011, 0010, 0111,
0000, 1000. Burada bitler 0 ya da 1 değeri elabildiği için Radix ağacı da ikili ağaç görünümünde
olacaktır. Ağacın her adımında yüksek anlamlı bitten başlanarak 0 için sola 1 için de sağa dallanma yapılır.
Aşağıdaki diyagram bu sekiz anahtarın ağaca yerleştirilmesi sonucundaki durumu göstermektedir:
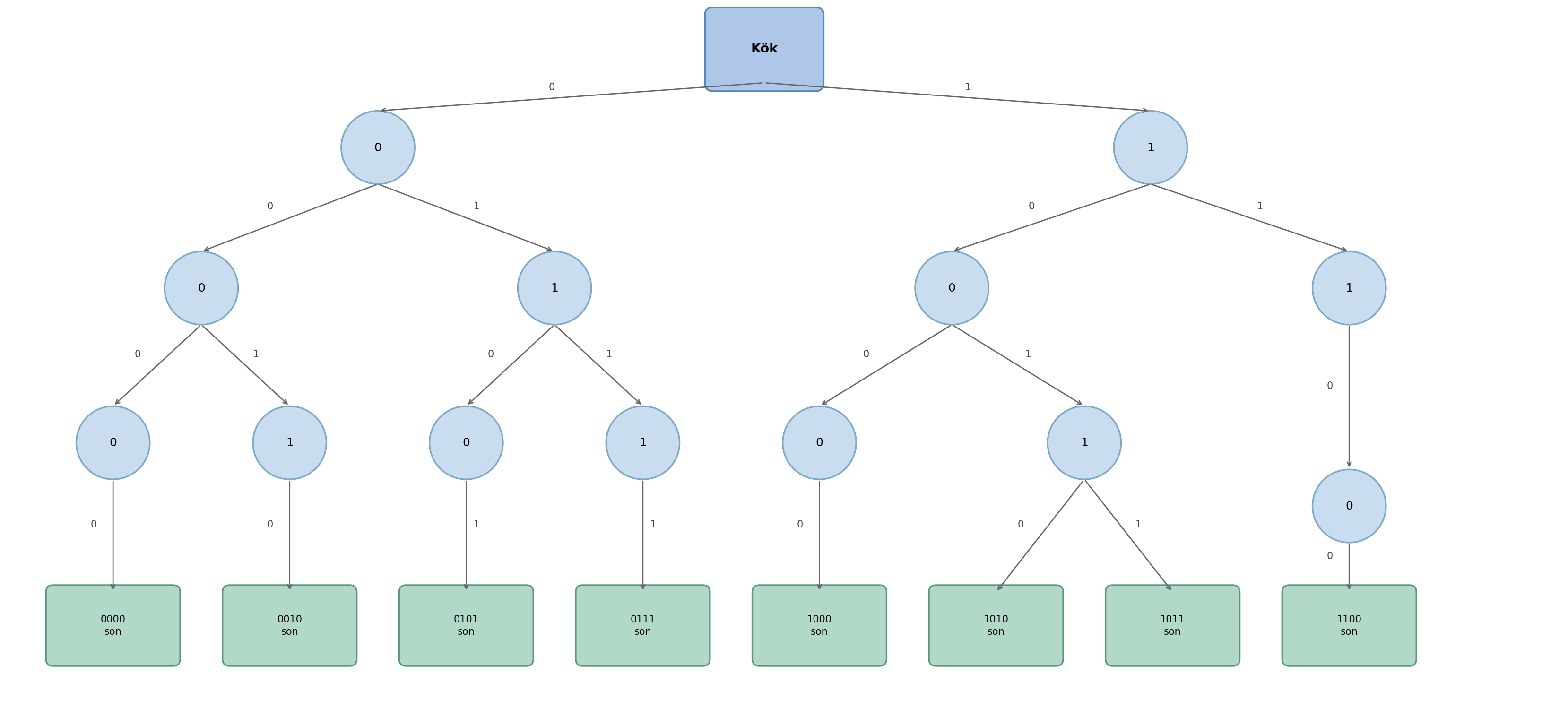
Peki bu ağaçta arama nasıl yapılır? İşte arama için kökten girilir. Her bit pozisyonu için bir aşağıya
inilir. Örneğin 0000 değerini arayacak olalım: ilk bit 0 olduğu için kökten sola ineriz, ikinci bit
de 0 olduğu için sola devam ederiz, üçüncü bit de 0 olduğu için sola, dördüncü bit de 0 olduğu için
sola gideriz. Artık değeri buluruz. Radix ağaçlarını enlemesine (breadth-first gibi) dolaştığımızda
anahtarların sıralı bir biçimde elde edilebildiğine dikkat ediniz.
Görüldüğü gibi bu tasarımda hiç anahtar saklanmadan yaprak görülene kadar ilerlenirse ya ilgili anahtar bulunmuş olur ya da bulunamamış olur. Aslında Radix ağaçlarında anahtar ve değerler düğümlerde de turulabilir. Peki her düğümde anahtar ve değeri tutmakla yalnızca yapraklarda değeri tutmanın hangisi daha iyi bir yöntemdir?
Yöntem |
Avantajları |
Dezavantajları |
|---|---|---|
Her düğümde anahtar saklama |
Erken durabilme; ara düğümde tam eşleşme bulununca yaprağa kadar inmek gerekmez. Prefix aramaları daha kolay. |
Veri yapısı karmaşıklaşır; bellek kullanımı artar. |
Yalnızca yapraklarda değer saklama |
Basit tasarım: iç düğümler yalnızca yönlendirme bilgisi tutar. Bellek daha düzenli kullanılır. Ekleme/silme algoritmaları daha etkin. |
Her zaman yaprağa kadar inmek gerekir. Prefix tabanlı aramalarda ek iş yapılması gerekir. |
Not
Linux’un klasik radix ve XArray gerçekleştirimlerinde değerler her zaman yapraklarda tutulmaktadır. Ara düğümlerde anahtarlar tutulmamaktadır.
Radix ağacının ikili ağaç olması zorunlu değildir. Dallanma bit bit yapıldığında yukarıdaki örnekte olduğu gibi radix ağacı ikili ağaç durumunda olur. Ancak dallanma n bit n bit de yapılabilir. Bu durumda ağaç da 2n-li ağaç olacaktır.
Örneğin 32 bitlik pid değerlerini böyle bir ağaçta tutmak isteyelim ve dallanmayı 6 bit 6 bit yapalım. 6 bit → 26 = 64 farklı dallanmaya yol açacaktır. Bu durumda ağacımızın her düğümünde 64 gösterici bulunacaktır ve yapraklara varabilmek için en fazla 6 kademe ilerlenecektir:
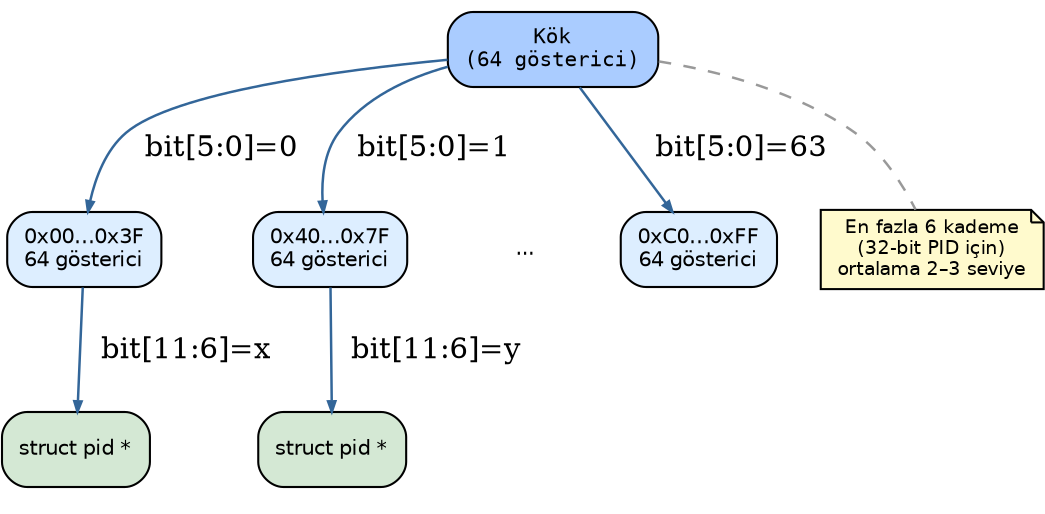
Güncel sürümlerde Linux’un pid araması için kullandığı XArray ağacı bu örnekteki gibi altışar bitlidir.
Hash tablosu ile XArray/Radix ağacı arasındaki avantaj ve dezavantajları karşılaştıralım:
Ölçüt |
Hash Tablosu |
XArray / Radix Ağacı |
|---|---|---|
Arama karmaşıklığı |
Ortalama O(1); çakışmada en kötü O(N) |
O(logk N), tipik derinlik 2–3 |
Bellek kullanımı |
Tablo önceden sabit boyutta ayrılır; seyrek pid’lerde boşa gider |
Yalnızca kullanılan düğümler açılır; seyrek alanda çok verimli |
Çakışma |
Mümkün; performansı düşürebilir |
Yok; her pid tek bir yolu izler |
Ölçeklenebilirlik |
Tablo boyutunu baştan iyi seçmek gerekir |
pid alanı büyüse bile uyum sağlar |
Sıralı gezinme |
Doğal sıralama yok; yavaş |
Doğası gereği sıralı; çok hızlı |
Boş pid bulma |
Ayrı veri yapısı gerektirir |
Aynı ağaç hem arama hem tahsisat için kullanılır |
Özetle: tekil arama için hash tablosu genellikle biraz daha hızlıdır; ancak büyük ve seyrek pid isim alanlarında XArray çok daha verimli bellek kullanır. Sıralı gezinme ve boş pid bulma gerektirdiğinde XArray üstün gelir. Güncel çekirdeklerde hem pid aramaları hem de boş pid değerlerinin tespit edilmesi işlemleri bu XArray gerçekleştirimi ile sağlanmaktadır.
4.13.5. Güncel Çekirdeklerde pid Araması (4.20+)
Çekirdeğin 4.20 versiyonundan itibaren her pid isim alanı için ayrı bir XArray ağacı oluşturulmaya başlanmıştır. Anımsanacağı gibi 2.6’lı versiyonlarda hash tablolarına geçildiğinde tüm pid isim alanları aynı hash tablosunda bulunuyordu. Halbuki güncel çekirdeklerde bir pid nesnesi aranacaksa o nesne belli bir pid isim alanındaki XArray ağacında aranmaktadır.
4.20 ve sonrasında task_struct yapısında thread_pid elemanı da eklenmiştir:
struct task_struct {
/* ... */
pid_t pid;
struct pid *thread_pid; /* pid değerine ilişkin pid nesnesinin adresi */
/* ... */
};
Güncel pid yapısı şöyledir:
struct pid {
refcount_t count;
unsigned int level;
spinlock_t lock;
struct {
u64 ino;
struct rb_node pidfs_node;
struct dentry *stashed;
struct pidfs_attr *attr;
};
struct hlist_head tasks[PIDTYPE_MAX];
struct hlist_head inodes;
wait_queue_head_t wait_pidfd;
struct rcu_head rcu;
struct upid numbers[]; /* isim alanı bilgisi */
};
Güncel versiyonlarda upid yapısı şöyledir (hlist_node bağı kaldırılmış, ns bilgisi korunmuştur):
struct upid {
int nr;
struct pid_namespace *ns;
};
Güncel çekirdeklerde pid araması yapan yüksek seviyeli fonksiyonlardan biri find_vpid fonksiyonudur:
struct pid *find_vpid(int nr)
{
return find_pid_ns(nr, task_active_pid_ns(current));
}
EXPORT_SYMBOL_GPL(find_vpid);
Bu fonksiyon belli bir pid değerine ilişkin pid nesnesini çağrıyı yapan prosesin bulunduğu pid isim alanı içerisindeki XArray ağacında aramaktadır. Aşağıdaki diyagram güncel çekirdekteki çağrı zincirini göstermektedir:

Prosesin içinde bulunduğu pid isim alanının bilgisine ulaşım çağrı zinciri şöyledir:
struct pid_namespace *task_active_pid_ns(struct task_struct *tsk)
{
return ns_of_pid(task_pid(tsk));
}
static inline struct pid *task_pid(struct task_struct *task)
{
return task->thread_pid;
}
static inline struct pid_namespace *ns_of_pid(struct pid *pid)
{
struct pid_namespace *ns = NULL;
if (pid)
ns = pid->numbers[pid->level].ns;
return ns;
}
XArray ağacında arama yapan find_pid_ns fonksiyonu artık son derece sade bir görünümdedir:
struct pid *find_pid_ns(int nr, struct pid_namespace *ns)
{
return idr_find(&ns->idr, nr);
}
EXPORT_SYMBOL_GPL(find_pid_ns);
Ağaçta arama yapan asıl fonksiyon idr_find isimli fonksiyondur.
4.13.6. XArray Gerçekleştirimi
XArray veri yapısının aşağı seviyeli gerçekleştirimi include/linux/xarray.h dosyası içerisinde
yapılmıştır. XArray ağacı bu dosyadaki xarray isimli yapıyla temsil edilmiştir:
struct xarray {
spinlock_t xa_lock;
/* private: */
gfp_t xa_flags;
void __rcu *xa_head;
};
Bu ağaç üzerinde işlem yapan xa_ öneki ile başlayan bir grup fonksiyon vardır:
void *xa_load(struct xarray *, unsigned long index);
void *xa_store(struct xarray *, unsigned long index, void *entry, gfp_t);
void *xa_erase(struct xarray *, unsigned long index);
void *xa_store_range(struct xarray *, unsigned long first, unsigned long last, void *entry, gfp_t);
bool xa_get_mark(struct xarray *, unsigned long index, xa_mark_t);
void xa_set_mark(struct xarray *, unsigned long index, xa_mark_t);
void xa_clear_mark(struct xarray *, unsigned long index, xa_mark_t);
void *xa_find(struct xarray *, unsigned long *index, unsigned long max, xa_mark_t);
void *xa_find_after(struct xarray *, unsigned long *index, unsigned long max, xa_mark_t);
unsigned int xa_extract(struct xarray *, void **dst, unsigned long start, unsigned long max, unsigned int n, xa_mark_t);
void xa_destroy(struct xarray *);
XArray ağacı üzerinde üzerinde işlemlerinde kullanılan daha xas_ önekli fonksiyonlar da bulunmaktadır. Bunlar
xa_state nesneleri ile çalışmaktadır. xa_state nesneleri ağaca yapılan erişimlerin taşıyıcıları gibi düşünebilirsiniz.
Bunların bazıları her XArray ağacında değil bazı XArray ağaçlarında anlamlı bir kullanıma sahiptir:
void *xas_load(struct xa_state *);
void *xas_store(struct xa_state *, void *entry);
void *xas_find(struct xa_state *, unsigned long max);
void *xas_find_conflict(struct xa_state *);
void *xas_find_marked(struct xa_state *, unsigned long max, xa_mark_t);
bool xas_get_mark(const struct xa_state *, xa_mark_t);
void xas_set_mark(const struct xa_state *, xa_mark_t);
void xas_clear_mark(const struct xa_state *, xa_mark_t);
void xas_init_marks(const struct xa_state *);
bool xas_nomem(struct xa_state *, gfp_t);
void xas_destroy(struct xa_state *);
void xas_pause(struct xa_state *);
void xas_create_range(struct xa_state *);
int xas_get_order(struct xa_state *xas);
void xas_split(struct xa_state *, void *entry, unsigned int order);
void xas_split_alloc(struct xa_state *, void *entry, unsigned int order, gfp_t);
void xas_try_split(struct xa_state *xas, void *entry, unsigned int order);
unsigned int xas_try_split_min_order(unsigned int order);
int xas_error(const struct xa_state *xas);
void xas_set_err(struct xa_state *xas, long err);
bool xas_invalid(const struct xa_state *xas);
bool xas_valid(const struct xa_state *xas);
bool xas_is_node(const struct xa_state *xas);
void xas_reset(struct xa_state *xas);
void xas_set(struct xa_state *xas, unsigned long index);
void xas_set_order(struct xa_state *xas, unsigned long index, unsigned int order);
void xas_advance(struct xa_state *xas, unsigned long index);
bool xas_retry(struct xa_state *xas, const void *entry);
void *xas_reload(struct xa_state *xas);
void *xas_next(struct xa_state *xas);
void *xas_prev(struct xa_state *xas);
void *xas_next_entry(struct xa_state *xas, unsigned long max);
void *xas_next_marked(struct xa_state *xas, unsigned long max, xa_mark_t mark);
void xas_set_update(struct xa_state *xas, xa_update_node_t update);
void xas_set_lru(struct xa_state *xas, struct list_lru *lru);
Bu fonksiyonların tanımlamaları include/linux/xarray.h ve lib/xarray.c dosyalarında yapılmıştır.
Güncel çekirdeklerin yukarıda belirttiğimiz aşağı seviyeli fonksiyonlarının yanı sıra aynı zamanda
bunları kullanan yüksek seviyeli IDR fonksiyonları da bulunmaktadır. Çekirdek kodları incelendiğinde
genellikle bu yüksek seviyeli idr_ önekli fonksiyonların kullanıldığı görülmektedir. Aşağıdaki
diyagram üç katman arasındaki ilişkiyi göstermektedir:
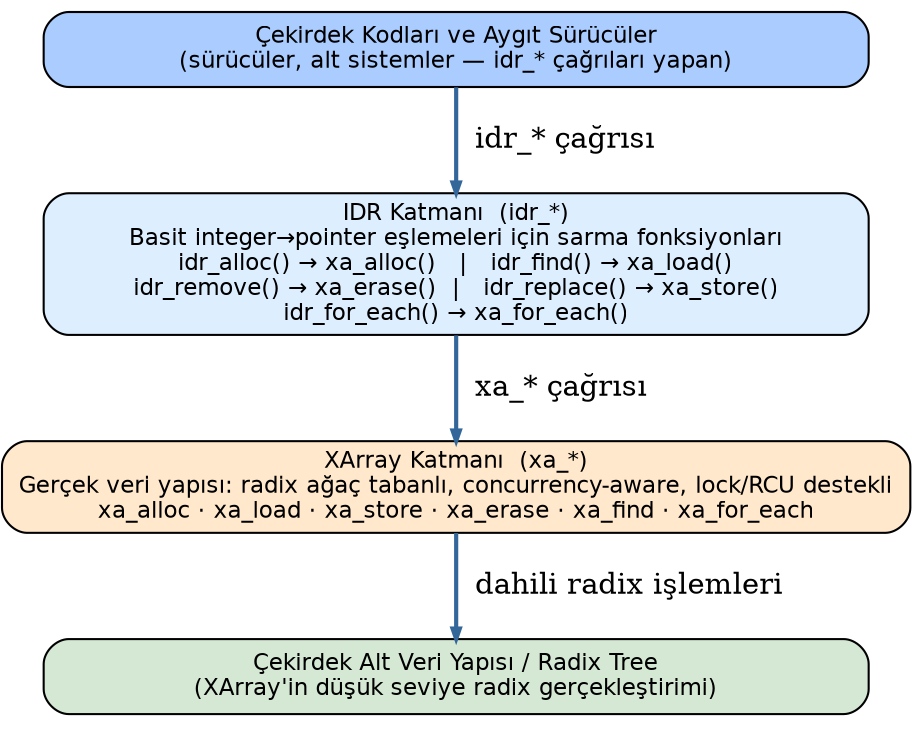
Boş pid değerinin elde edilmesi de aynı XArray altyapısı üzerinden yapılmaktadır:
/* Boş pid tahsisatı çağrı zinciri */
alloc_pid --> idr_alloc_cyclic --> idr_alloc_u32 --> idr_get_free
XArray gerçekleştirimi hakkında ileride başka konularda ek bilgiler vereceğiz.